
Golyó a keréken
Ver240104a
https://konf2023.kvk.uni-obuda.hu/publikaciok
Dobány Imre, Dr. Kopják József
Dobány Imre, Kandó Kálmán Villamosmérnöki Kar, Óbudai Egyetem, 1034 Budapest, Bécsi út 94-96., imre@dobany.hu
Absztrakt: https://konf2023.kvk.uni-obuda.hu/absztraktok
A „golyó a keréken” problémában egy golyót kell egyensúlyozni a biciklikerék tetején. Ez egy általános iskolapélda az irányítástechnika szakterületén [1], hasonlóan a jól ismert „fordított inga” vagy a „reaction wheel” problémákhoz.
A SISO szabályozás bemente a golyó pozíció, kimenete a motor feszültség. A modell alkotás Newton és Lagrange módszerrel készült, amelyek után a motor paraméter identifikáció és a szabályozó tervezés követte PID, állapot visszacsatolás, állapot becslővel és LQ [2] szabályozókkal Scilab, Xcos és Octave-CLI fejlesztőkörnyezetben. A motorhoz HALL szenzoros hajtás került megvalósításra Arduino-CLI-Nano fejlesztő környezetben. Mivel a legegyszerűbb, legköltséghatékonyabb oktatási összeállításra törekedtem, ezért Linux-os operációs rendszeren, akár PC-n vagy például Raspberry PI számítógép platformon futtatható a szabályozó Octave szkript. A számítógép UART interfészen kommunikál az Arduino Nano kártyával, ahol analóg pozíció érzékelés történik Tsample = 20-100msec időzítéssel, amit a Linux delegált CPU-core-ja elegendő pontossággal kiszolgál. Az Arduino végzi a BLDC motor hajtást a kapott motor kapocsfeszültség alapján.
Az összeállítással megmutatható a modellalkotás, motor paraméter identifikáció, szabályozó tervezés menete, továbbá vizsgálható a szabályozók érzékenysége és robusztussága.
A cikk célja, hogy megmutasson egy automatizálási feladat megoldást a kezdetektől a fizikai megvalósításig modern, de a végletekig leegyszerűsített anyagi erőforrást igénylő eszközökkel, ily módon alkalmassá téve a mindenki számára hozzáférhető oktatási demonstrációs eszközként.
Először a kísérleti elrendezés és a rendszer fizikai tulajdonságai 19kerülnek röviden bemutatásra, amelyek a későbbi szabályozó tervezéshez szükségesek. Ezt követi a modellalkotás Newton és Lagrange módszerrel a fizikai tanulmányok iskola példájaként.
A rendszer modell linearizálása után a szabályozó tervezés bemutatása követi, amelyben a manapság használatos programokkal elvégezhető matematikai műveletsorok kerülnek bemutatásra, míg a mélyebb magyarázatot a megjelölt irodalomjegyzékben megtalálhatjuk. A következő fejezetekben a szabályozó megvalósítás valamint golyó pozíció érzékelés és beavatkozáshoz szükséges motor hajtás kerül megemlítésre.
A cikk végén a szabályozó tervezéshez szükséges fizikai paraméterek meghatározásához (paraméter identifikáció) szükséges lépések kerülnek bemutatásra.
Az összeállítás továbbfejlesztési lehetőségeket rejt magában, mint például felhasználói böngészőn keresztüli html interfész kialakítását, ahol szabályozó típust (PID, állapotvisszacsatolás, LQ), mintavételi időt, jittert, alapjelet, stb. lenne lehetőség állítani, így vizsgáhatóvá válna a különböző szabályozók érzékenység és robosztusságának vizsgálatára. Az eszköz valamely egyszerűsített, lekicsinyített másolata alkalmas lehet csináld magad (DIY) egységcsomag kialakítására, amely motiváló lehet a tanulók számára.
Az összeállításról videó elérhető az alábbi linken: https://drive.google.com/file/d/1aYekoKIV0XY-9lRHnn9m6GJVegpmdNTa/view?usp=drive_link
Röviden ismertetem a ’golyó a keréken’ rendszert, amely egy általánosan ismert irányítástechnikai iskolapélda. Leegyszerűsítve arról van szó, hogy egy kerék tetején kell egy golyót egyensúlyozni, ahol beavatkozó szerv egy kereket hajtó motor, lásd az alábbi ábra.
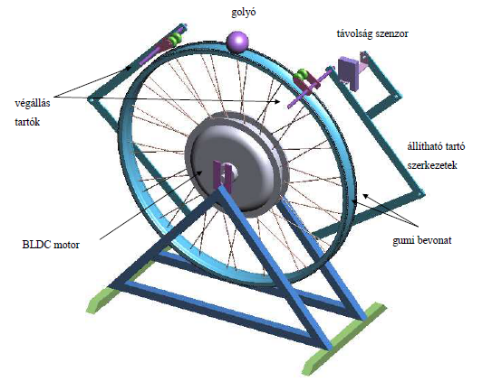
Esetemben egy elektromos kerékpár 22 col-os tömlő nélküli felni gumival bevont peremein gurul egy biliárdgolyó. A kereket BLDC motor hajtja, hall szenzorokkal ellátva. A golyó pozícióját lézeres távolságmérővel mérem. Az így kialakult rendszer egy egydimenziós kényszerpályán mozgó golyó, aminek gyakorlatilag nincs egyensúlyi pontja, ezért csak instabil pozícióra tudunk szabályozni vagy egy trajektória mentén irányítani a rendszert, ha a rendszer irányítható és mivel csak a golyó pozíciót mérem, ezért a rendszer belső állapotainak megállapításához becslőt kell használni, amennyiben a rendszer matematikailag megfigyelhető.
Matematikai lineáris modellre van szükségünk, hogy a szabályozót meg tudjuk valósítani. Fizikában a mechanika és az elektrodinamika területén a Newton és Lagrange modellezés használatos.
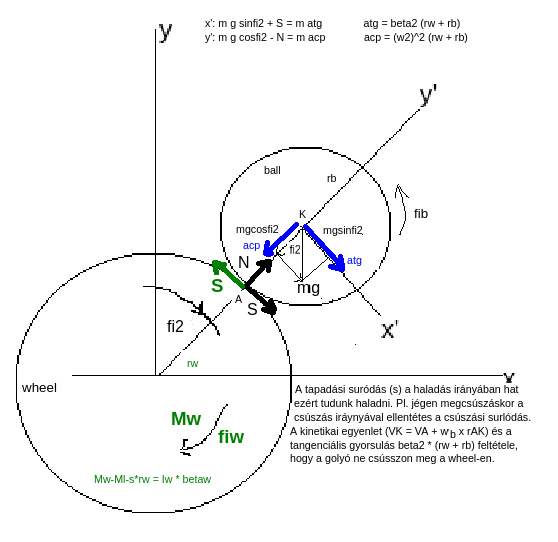
2-1. ábra Golyó a keréken rendszermodell [1]
2-1. táblázat Terminológia és paraméterek
A modellhez elengedhetetlen, hogy a golyó a keréken ne csússzon meg, azaz a tapadás mindvégig fennálljon, ami a tiszta gördülés esetét jelenti. Ekkor a találkozási pont nyugalomban van, nincs relatív elmozdulás, tehát úgy modellezhető, mintha a golyó és a kerék össze lenne ragasztva. Más kérdés, hogy a golyó közben forog a kerületén ható erő miatt, ami majd forgató nyomatékot okoz. Ezen ok miatt az (AN.1.) használható.
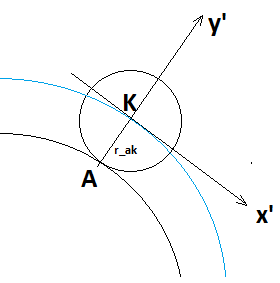
A golyó (Vk) tömegközéppontjának transzlációs (VA) és rotációs (wb x rAK) mozgása közötti kapcsolatot az alábbi egyenlettel fejezhetjük ki. [10]
![]() (AN.1.)
(AN.1.)
![]() (AN.2.)
(AN.2.)
![]() (AN.5.)
(AN.5.)
A tiszta gördülés, tapadás addig áll fenn, amíg a tapadási erő kisebb vagy egyenlő, mint a súrlódási erő.
![]() (AN.6)
(AN.6)
A μ értékét az anyagok közötti tulajdonságok határozzák meg. A fenti azonosságot tapasztalati úton fogom ellenőrizni. A differenciálegyenlet felírásához, majd, mint látni fogjuk közvetlenül erre nincs szükség.
A golyó mozgás egyenletének felírásakor kísérő-triéderes koordináta rendszert használok a 2-1. ábra szerint (x’; y’).
Egy tömegközéppontra 6 mozgásegyenletet tudunk felírni:
3-at, (x; y; z) irányban a transzlációs mozgásra és
3-at, (x2; y2; z2) irányban a rotációs mozgásra.
Jelen esetben, mivel sík problémáról van szó
2 db egyenlet a transzlációs mozgásról szól (x; y)
1 db egyenlet a rotációs, forgómozgásról szól (z2)
transzlációs egyenletek
![]() (AN.7)
(AN.7)
![]() (AN.9)
(AN.9)
![]() (AN.8)
(AN.8)
![]() (AN.10)
(AN.10)
rotációs egyenlet
![]() (AN.11)
(AN.11)
A kerék koordináta rendszerét az 2-1. ábra szerint választom. Mivel transzlációs mozgást nem végez a kerék, ezért egyenletei sincsenek. Mivel a kerék forog, ezért rotációs egyenlete van.
![]() (AN.12)
(AN.12)
Az ‘M’ nyomatékba a motor csapágy súrlódást (ML) negatív előjellel a későbbiekben bele kell számolni.
![]() (AN.13)
(AN.13)
![]() és
és
![]() (AN.14)
(AN.14)
 (AN.15)
(AN.15)
![]() (AN.16)
(AN.16)
Az egyenletrendezés például Octave, Sympy, Matlab és Maxima programokkal is megoldhatóak.
A Lagrange modell szerint a szakasz Lagrange függvénye [1][2]
![]() (AL.1)
(AL.1)
ahol ’T’ a mozgási energia és ’V’ a helyzeti energia, ’L’ pedig a Lagrange-függvény.
Esetünkben tehát:
![]() (AL.2)
– kerék mozgási energiája
(AL.2)
– kerék mozgási energiája
![]() (AL.3)
– Golyó mozgási energiája
(AL.3)
– Golyó mozgási energiája
![]() (AL.4)
– Golyó helyzeti energiája
(AL.4)
– Golyó helyzeti energiája
![]() (AL.5)
(AL.5)
![]()
(AL.9)
Így a Lagrange változók:
![]() (AL.10)
(AL.10)
A Lagrange-egyenlet nem konzervatív rendszer esetén:
![]() (AL.12)
(AL.12)
ahol
![]() a nem konzervatív erőkből álló általános erők eredője.
a nem konzervatív erőkből álló általános erők eredője.
Tehát
a feladat (AL.9) egyenlet (AL.12) egyeletbe helyettesítése és
megoldása. Az (AL.12) egy egyenletrendszer, amelyben Qi*(![]() ;
;
![]() ).
).
![]() (AL.13),
a motor modell alapján,
(AL.13),
a motor modell alapján,
![]() (AL.14),
a pozíciónak nincs
(AL.14),
a pozíciónak nincs
![]() általános
ereje. A motor modelljében (
általános
ereje. A motor modelljében (![]() az armatúra áram dinamikája elhanyagolásra került.
az armatúra áram dinamikája elhanyagolásra került.
2.3.1
Lagrange parciális derivált
![]() szerint.
szerint.
(AL.15)
2.3.2
Lagrange parciális derivált
![]() szerint.
szerint.
![]() (AL.16)
(AL.16)
Az (AN15), (AN.16) és (AL15), (AL.16) egyenleteket páronként összehasonlítva, látható, hogy az egyenletek megegyeznek, tehát igazoltuk, hogy a különböző modellek azonos eredményt adnak.
#script
pkg load symbolic
clear
syms t
syms fib fiw fi2 omegab betab omegaw betaw omega2 beta2
syms mb g N s rb rw rv km ku Ua Ra thetab thetaw murelative
syms x y z
#kinematika
vbc_m = [[(rw + rb) * omega2]; [0]; [0]]
vp_m = [[rw * omegaw]; [0]; [0]]
omegab_m = [[0]; [0]; [omegab]]
rb_m = [[0]; [rb]; [0]]
#s <= murelative * N # not used
#dinamika
#dinamika golyo
acp = omega2^2*(rw+rb) # not used
mb * g * cos(fi2) - N == mb * acp # not used
atg = beta2*(rw+rb)
#dinamika kerek
Mm = km*(Ua-ku*omegaw)/Ra
Ms = rv*omegaw
#---------------------
kzzz=(vp_m + cross(omegab_m, rb_m))
sol_omegab = solve(vbc_m(1) == kzzz(1), omegab)
betab = (-beta2*rb - beta2*rw + betaw*rw) / rb
sol_s = solve(s * rb == thetab * betab, s)
equs=[
mb * g + sol_s == mb * atg;
Mm - Ms - sol_s * rw == thetaw * betaw;
]
equs_sol=solve(equs, beta2, betaw)
equs_sol
#eof
#outputs
>> bow_v2
Symbolic pkg v3.1.1: Python communication link active, SymPy v1.10.1.
vbc_m = (sym 3x1 matrix)
[omega2*(rb + rw)]
[ ]
[ 0 ]
[ ]
[ 0 ]
vp_m = (sym 3x1 matrix)
[omegaw*rw]
[ ]
[ 0 ]
[ ]
[ 0 ]
omegab_m = (sym 3x1 matrix)
[ 0 ]
[ ]
[ 0 ]
[ ]
[omegab]
rb_m = (sym 3x1 matrix)
[0 ]
[ ]
[rb]
[ ]
[0 ]
acp = (sym)
2
omega2 *(rb + rw)
ans = (sym)
2
-N + g*mb*cos(fi2) = mb*omega2 *(rb + rw)
atg = (sym) beta2*(rb + rw)
Mm = (sym)
km*(Ua - ku*omegaw)
-------------------
Ra
Ms = (sym) omegaw*rv
kzzz = (sym 3x1 matrix)
[-omegab*rb + omegaw*rw]
[ ]
[ 0 ]
[ ]
[ 0 ]
sol_omegab = (sym)
-omega2*rb - omega2*rw + omegaw*rw
----------------------------------
rb
betab = (sym)
-beta2*rb - beta2*rw + betaw*rw
-------------------------------
rb
sol_s = (sym)
-beta2*rb*thetab - beta2*rw*thetab + betaw*rw*thetab
----------------------------------------------------
2
rb
equs = (sym 2x1 matrix)
[ -beta2*rb*thetab - beta2*rw*thetab + betaw*rw*thetab ]
[ g*mb + ---------------------------------------------------- = beta2*mb*(rb + rw) ]
[ 2 ]
[ rb ]
[ ]
[ rw*(-beta2*rb*thetab - beta2*rw*thetab + betaw*rw*thetab) km*(Ua - ku*omegaw) ]
[-omegaw*rv - --------------------------------------------------------- + ------------------- = betaw*thetaw]
[ 2 Ra ]
[ rb ]
equs_sol =
scalar structure containing the fields:
beta2 =
<class sym>
betaw =
<class sym>
equs_sol =
scalar structure containing the fields:
beta2 =
<class sym>
betaw =
<class sym>
A számolást Sympy programmal is elvégzem. A Raspberry Pi Zero 2w, Debian rendszerre:
imre@raspberrypi:~ $ sudo apt-get install python3-pip
git clone https://github.com/sympy/sympy.git
git pull origin master
python -m pip install -e .
imre@raspberrypi:~ $ python ./bowSymbol.py
Python 3.9.2 (default, Feb 28 2021, 17:03:44)
# sudo apt-get install python
# sudo apt-get install python3-pip
# python .\bow.py
from sympy import *
import sympy as sp
import sympy
print("Hello, World!")
print(sympy.__version__)
#golyo kinematika
rw, rb, omega2, omegaw, omegab = symbols('rw rb omega2 omegaw omegab')
vbc_m = Matrix([[(rw + rb) * omega2], [0], [0]])
#print(vbc_m[0])
vp_m = Matrix([[rw * omegaw], [0], [0]])
omegab_m = Matrix([[0], [0], [omegab]])
rb_m = Matrix([[0], [rb], [0]])
eq_kin1 = Eq(vbc_m[0], (vp_m + omegab_m.cross(rb_m))[0])
eq_kin1 = simplify(eq_kin1)
print(eq_kin1)
print("ezt kene automatan kifejezni, ha omegara igaz, akkor beta-ra is…")
#Eq(omega2*(rb + rw), -omegab*rb + omegaw*rw)
beta2, betaw, betab = symbols('beta2 betaw betab')
eq_kin2 = Eq(beta2*(rb + rw), -betab*rb + betaw*rw)
print(eq_kin2)
#sol_beta2 = solve(eq_kin2, beta2)
#print(sol_beta2)
#golyo dinamika
m, g, fi2, N, S, jb = symbols('m g fi2 N S jb')
acp = omega2**2*(rw+rb)
eq_dinb1 = Eq(m*g*cos(fi2)-N, m*acp)
print(eq_dinb1)
atg = beta2*(rw+rb)
eq_dinb2 = Eq(m*g*sin(fi2)+S, m*atg)
print(eq_dinb2)
eq_dinb3 = Eq(S * rb, jb * betab)
print(eq_dinb3)
#kerek dinamika
u, ke, ki, Ra = symbols('u ke ki Ra')
Mw, Ml, jw, FF = symbols('Mw Ml jw FF')
Mw = ki*(u-ke*omegaw)/Ra
Ml = FF*omegaw
eq_dinw1 = Eq(Mw - Ml - S*rw, jw*betaw)
print(eq_dinw1)
#https://docs.sympy.org/latest/guides/solving/solve-system-of-equations-algebraically.html
#Equations Which Have a Closed-Form Solution, and SymPy Cannot Solve
#https://stackoverflow.com/questions/31547657/how-can-i-solve-system-of-linear-equations-in-sympy
#sol = solve([eq_kin1, eq_kin2, eq_dinb1, eq_dinb2, eq_dinb3, eq_dinw1], [beta2], dict=True)
sol = sp.solve((eq_kin1, eq_kin2, eq_dinb2, eq_dinb3, eq_dinw1), beta2, dict=True)
print(sol)
#answer: [] <----csak egy ures struktura...ugyenez jon octave-ban
#outputs
#Hello, World!
#1.9
#Eq(omega2*(rb + rw), -omegab*rb + omegaw*rw)
#ezt kene automatan kifejezni
#Eq(beta2*(rb + rw), -betab*rb + betaw*rw)
#Eq(-N + g*m*cos(fi2), m*omega2**2*(rb + rw))
#Eq(S + g*m*sin(fi2), beta2*m*(rb + rw))
#Eq(S*rb, betab*jb)
#Eq(-FF*omegaw - S*rw + ki*(-ke*omegaw + u)/Ra, betaw*jw)
#[]
#script ugyanaz,mint Octave
#output
beta2
val =
(Ua*km*rw*thetab - Ra*omegaw*rv*rw*thetab - km*ku*omegaw*rw*thetab + Ra*g*mb*rb^2*thetaw*sin(fi2) + Ra*g*mb*rw^2*thetab*sin(fi2))
/(Ra*(rb + rw)*(mb*thetaw*rb^2 + mb*thetab*rw^2 + thetab*thetaw))
betaw
val =
-(Ra*omegaw*rv*thetab - Ua*km*thetab + km*ku*omegaw*thetab - Ua*km*mb*rb^2 + Ra*mb*omegaw*rb^2*rv + km*ku*mb*omegaw*rb^2 - Ra*g*mb*rw*thetab*sin(fi2))
/(Ra*(mb*thetaw*rb^2 + mb*thetab*rw^2 + thetab*thetaw))
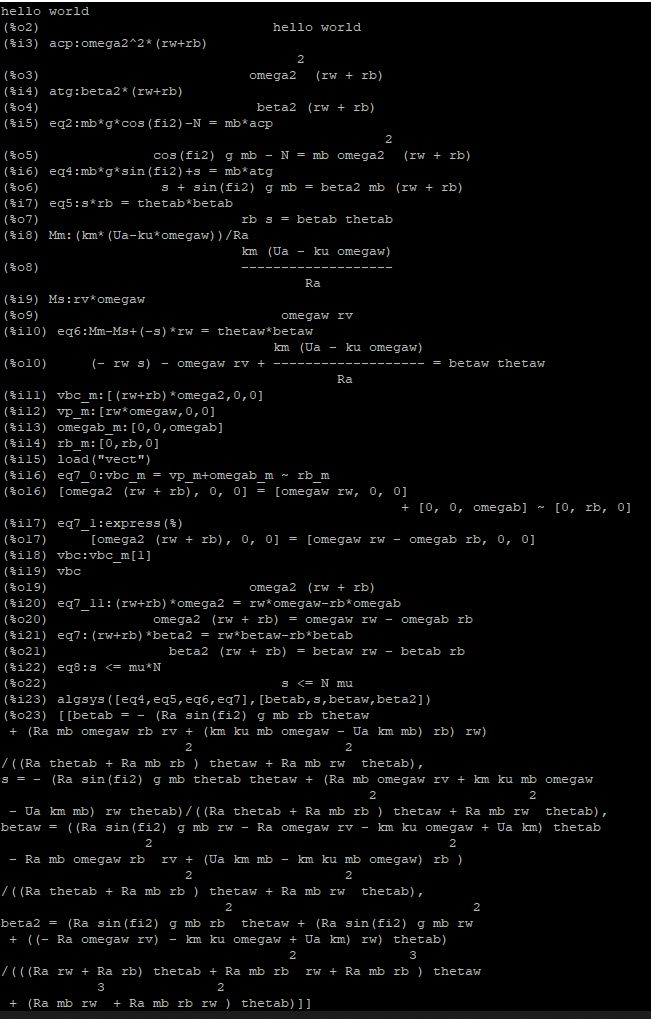
A számolást a Maxima programmal is elvégzem és összehasonlítást végzek a Sympy prgrammal.
>sudo apt-get install maxima
>maxima
(%i1)batch(“bow240108a.mc”)
Az
![]() rendszeregyenlethez a konstansokra egyszerűbb jelölést bevezetve:
rendszeregyenlethez a konstansokra egyszerűbb jelölést bevezetve:
![]() (AE.1)
(AE.1)
![]() (AE.2)
(AE.2)
![]() (AE.3)
(AE.3)
Ahol
![]() ;
; ;
; ;
;
![]() ;
;![]() ;
;![]() .
.
*****************
Az x=fx+g(x)UA rendszeregyenlethez a konstansokra egyszerűbb jelölést bevezetve:
ww=(wsin 2 -www)+wUa (AE.1)
w2=(2sin 2 -2ww)+2Ua (AE.2)
2=w2 (AE.3)
Ahol w=IbrwmbgIbIw+mbrb2Iw+mbIbrw2;w=Ib+mbrb2kUkM+rVRaRaIbIw+mbrb2Iw+mbIbrw2 ;w=k2Ib+mbrb2RaIbIw+mbrb2Iw+mbIbrw2 ;
2=Iwrb2+Ibrw2rw+rbIbIw+mbrb2Iw+mbIbrw2 ;2=IbrwkUkM+RarrRArw+rbIbIw+mbrb2Iw+mbIbrw2 ;2=IbrwkMRarw+rbIbIw+mbrb2Iw+mbIbrw2 .
A feladat, hogy az x=fx+g(x)∙UA🡪 linearizálás 🡪 x=Ax+b UA
ahol A=∂f∂x |Xe,UA és b=∂gUA |Xe,UA. Az Xeaz egyensúlyi helyzethez tartozó paramétereket tartalmazza, A rendszermátrix és b konstans vektor, ami a bemeneti UA paraméteren keresztül hat. Ennek érdekében az egyensúlyi pont körül linearizálást végzünk. A linearizálás során az egyensúlyi helyzet körül, amikor az x=0 megvalósul, a nem lineáris sin 2 ~=2 lineáris taggal közelítjük, ami 5 fokig gyakorlatban megfelelő.
fxxe=f1ww f1w2 f12; f2ww f2w2 f22; f3ww f3w2 f32 xe
=w2-wwwww w2-wwww2 w2-www2; 22-2wwww 22-2www2 22-2ww2; w2ww w2w2 w22
Tehát az x=Ax+b UA egyenlet az alábbiak szerint alakul:
ww; w2; 2 =-w 0 w; -2 0 2; 0 1 0 ww; w2; 2 +w; 2; 0 UA
CT= (0; 0;1)
D= 0
Így kialakult az állapotteres szakasz modell.
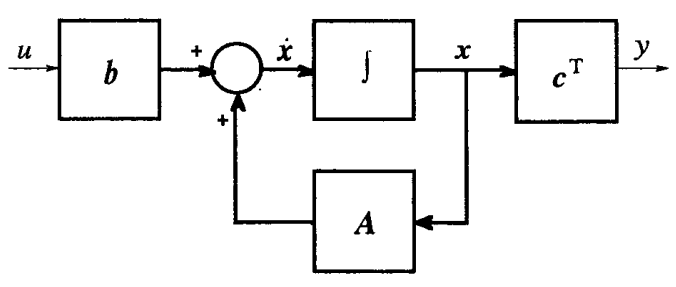
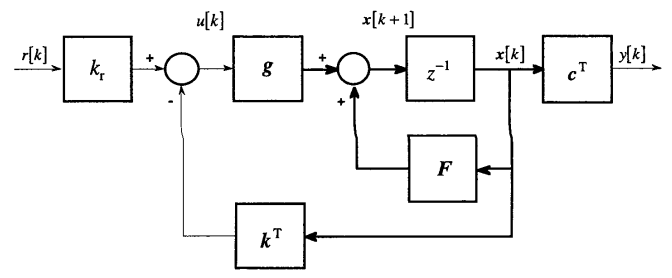
Ábra 2.3-1
Állapotteres
modell [3]
A symbolic tool-ok használatát izgalmas volt kipbálni, amire nekem szuksegem volt az csak a “Solve a System of Equations Algebraically” feladat. Nem volt szukseg numerikus megoldasra. Egyertelmuen a Maxima a legrobosztusabb, jollehet a legregebbi. Az Octave a Sympy-t hasznalja, ,ezert uaz az eredmenyt adja. Jo lenne megoldani, hogy a szimbolikus modell alkotas utan autoatikusan atterhtnenk a allapotteres linspace modell alkotasra (ss(A,B,C,D)) es LQ szabylozo tervezesre. Ehhez ket problemat kene megoldani: 1, a symbolumok derivaltjaval is tudjon a solve() dolgozni, valamint, hogy az Octave, sympy solve() is mukodjon. Ezt meg nem sikerult elernem.
|
Összehasonlítás |
Megjegyzés |
Octave |
Not works |
Octave uses Sympy ballonwheel/bash_solution_only_octave/bowSym.m |
Sympy |
Not works |
ballonwheel/sympy/bowSym.py |
Matlab |
OK |
ballonwheel/bash_solution_only_octave/bowSym.m |
Maxima |
OK |
ballonwheel/maxima/bowSym.mc |
Kézi számolás |
OK |
na |
A szabályozó tervezést a szakasz vizsgálatával szükségszerű kezdeni.
Részlettörtes alakra alakítást például Matlab program segítségével is végezhetjük, ‘zpk(bow_sys)’ függvény hívással:
8.5542 s
----------------------------- (3.1)
(s+56.44) (s+3.278) (s-3.282)
Látható, hogy van egy jobb oldali labilis, nem lengő pólus és egy jobb oldali kicsi nem lengő zérus, ami nem minimálfázisú rendszert jelent, tehát a bemeneti jel hatására lassú elszálló jelleget mutat a rendszer, ami egy késleltetést jelent.
A szakasz a Scilab ‘rank’ függvénnyel vizsgálva irányíthatónak és megfigyelhetőnek bizonyult [3].
AB = [B, A*B, A*A*B;] #irányíthatósági mátrix
--> rank(AB)
ans = 3. #irányítható a rendszer
--> CA=[C; C*A; C*A*A;]
--> rank(CA)
ans = 3. #megfigyelhető
A tervezésnél szempont az alacsony költség és az alkatrészek beszerezhetősége. Ezért már most kialakulnak sarokpontok:
Szabad felhasználású licensz, alacsony árú, egyszerű HW, például Arduino Nano + inverter: BTS7960-M, UART, Ts = 20-100msec,
Maximum kilengés < 5fok,
6step hajtás, 1 szektor-12.6 mm fent a kerék tetején 2.5fok,
TpositionADC = 2.5msec,
Tszakasz = 100msec,
Linux használat, softRT, Scilab, Octave az egyszerű kontroller implementacio érdekében lehet PC vagy SoC, pl Raspberry Zero 2W.
A fentiek figyelembe vételével a szakasz vizsgálatot követően a szabályozó paraméterek számítását hangolását, majd szimulációját Scilab, Xcos és Matlab programmal végeztem.
Mivel jobb oldali zérus van, azt polinom kiejtessel nem hasznos kiejteni, mert megmarad a belső instabilitás (nem irányítható, nem megfigyelhető)[3].
Tehát el kell fogadni a jobb oldali zérus által okozott ellentétes kilengést (minimálfázisú) és késleltetést. Mivel ez kicsi a szakasznál, e-14 nagyságrendű, lehet vele próbálkozni a gyakorlatban.
A jobb oldali labilis pólus kezelése [3], pólus kiejtés zérussal nem szabad, mert megmarad a strukturális instabilitás (nem megfigyelhető, nem irányíthatóvá válik). A szabályozó és szakasz nyílt hurkú Nyquist görbének az óra járásával ellentétesen kell 1-szer (1 jobb oldali pólus esetén) kerülnie -1-et. A PID szabályozó ideális paramétereit a Matlab program segítségével könnyen megtalálhatjuk.
>> Gd = c2d(sys, Ts); % Create discrete-time plant
>> pidTuner(Gd, 'pid')
Cpid_discr =
1 1
Kp + Ki * Ts * ------ + Kd * ----- * z-1
z-1 Ts
with Kp = 534, Ki = 5.14e+03, Kd = 12.1, Ts = 0.02
Sample time: 0.02 seconds
Discrete-time PID controller in parallel form.
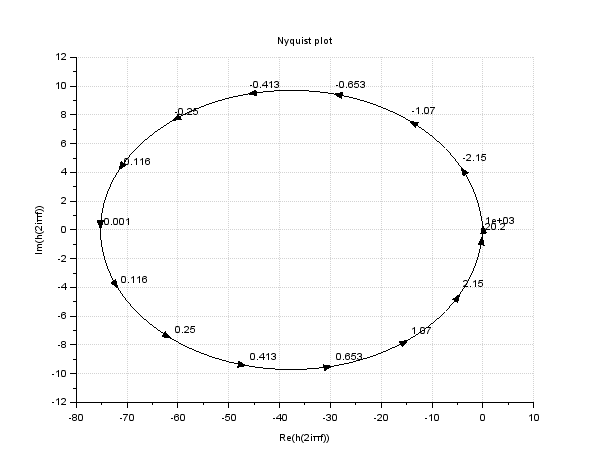
Ábra 3-1
Nyquist diagramm, PID szabályozó és szakasz, nyílt hurok
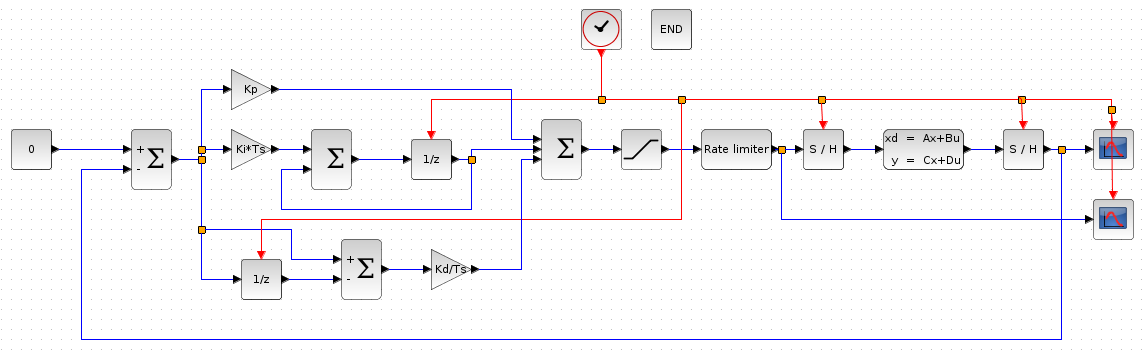
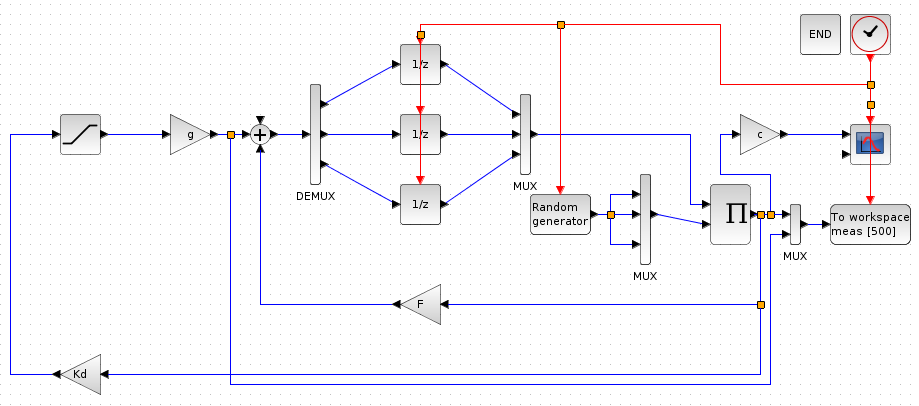
Ábra 3-2
PID szabályozó szimulációs blokkvázlat
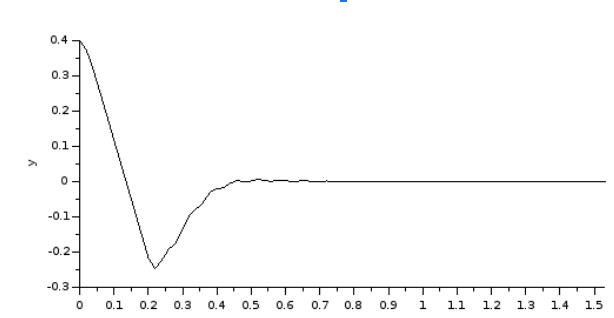
Ábra 3-3
PID szabályozó, pozíció idő függvény
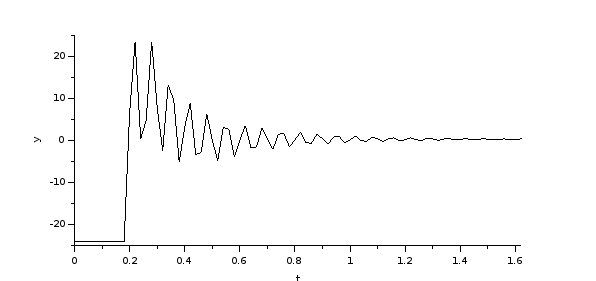
Ábra 3-4
PID szabályozó, motor feszültség
A szakasz diszkretizáció [3], amit például az Octave [7] programmal végezhetünk:
BoW_ssd=c2d(BoW_ss, Ts);
,ahol Ts a mintavételi idő.
Állapot visszacsatolás [3]
A visszacsatoló kT vektor meghatározása pólusáthelyezéses iterációval végezhető [3], amire most a cikk nem tér ki. Egy másik lehetőség az LQ algoritmus [3][4] alkalmazása, ahol lineáris vektor térben keressük a bemenet és a kimenet közötti optimumot paraméter súlyozással, költség függvénnyel. A súlyok meghatározása iterációs feladat, de jellegében a (3.2) szerint alakul [12].
![]() (3.2)
(3.2)
q1 = 0.009118906527810399; #omegaw súly
q2 = 0.0914991210900477; #omega2 súly
q3 = 131.3122540004697; #fi2 súly
R = 0.25; #Uk súly
Q = diag([q1, q2,q3]);
Big = blkdiag(Q,R); #közös nagy Q R matrix
#// Now we calculate C1 and D12
nstates = 3;
[w,wp] = fullrf(Big); #[5]
C1=wp(:,1:nstates); #kiválasztjuk az összes sort és az 1->nstates oszlopokat
D12=wp(:,end); #[C1,D12]'*[C1,D12]=Big //mindegyik sor utolsó eleme-->oszlop matrix
P = ss(A,B,C1,D12); #foly. idejű szakasz
[Kd,X] = lqr(P, Q, R);
Tehát a szabályozó a Kd vektor visszacsatoló tagból áll.
Ábra 3.4-1
Állapot visszacsatolás
Ábra 3.4-2
Állapot visszacsatolás, szimuláció idő diagram
Az állapot visszacsatolás akkor működik, ha az állapot változókat vissza tudjuk mérni, azonban legtöbbször nem ez a helyzet, mint ahogy ebben az esetben sem. Csak a golyó pozícióról van információnk, viszont mivel ismerjük a rendszer modellt, ezért lehetőség van megbecsülni a többi állapot változót [3][4].
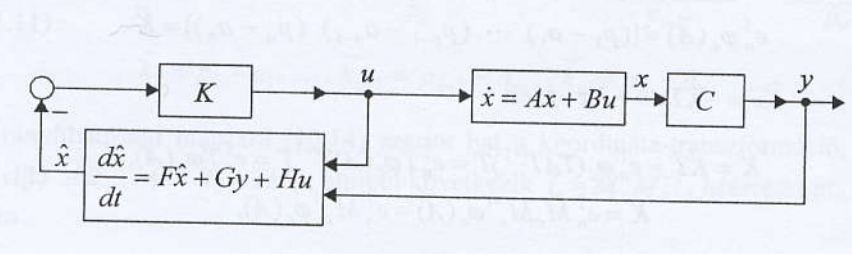
Ábra 3.5-1
Állapot becslő [4]
A becslő a szakasz modell egy másolata, amire szintén lehet az LQ eljárást alkalmazni.
FT = F';
cT = c';
Big_est = blkdiag(Q,R);
[w_est, wp_est] = fullrf(Big_est);
c1_est = wp_est(:,1:nstates);
d12_est = wp_est(:,end);
P_est = ss(FT, cT, c1_est, d12_est, Ts);
[K_estd,X_estd] = lqr(P_est, Q, R);
eFTcTKestd=eig(FT+cT*K_estd);
Gd = K_estd';
Fd = F - Gd * c;
Hd = g;
Tehát a szabályozó:
sum_zn1 = Fd * sum_zn1 + Gd * x(3) + Hd * u;
u = Kd * sum_zn1;
Ahol ‘x(3)’ a mért golyó pozíció, ‘u’ pedig a kiadott motor kapocsfeszültség.
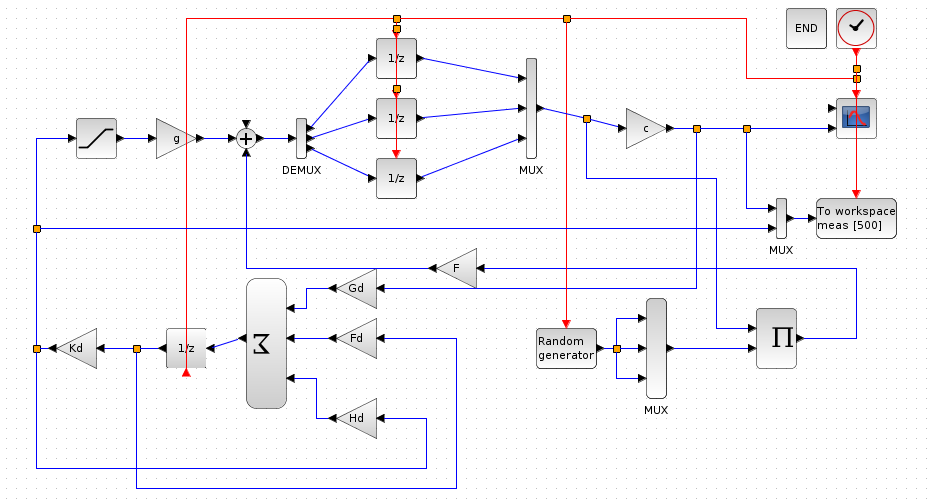
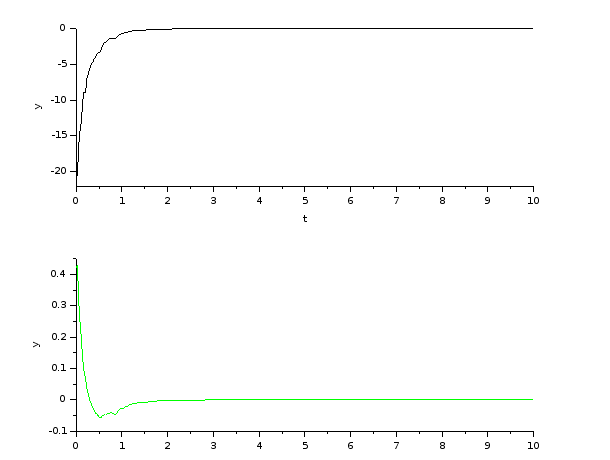
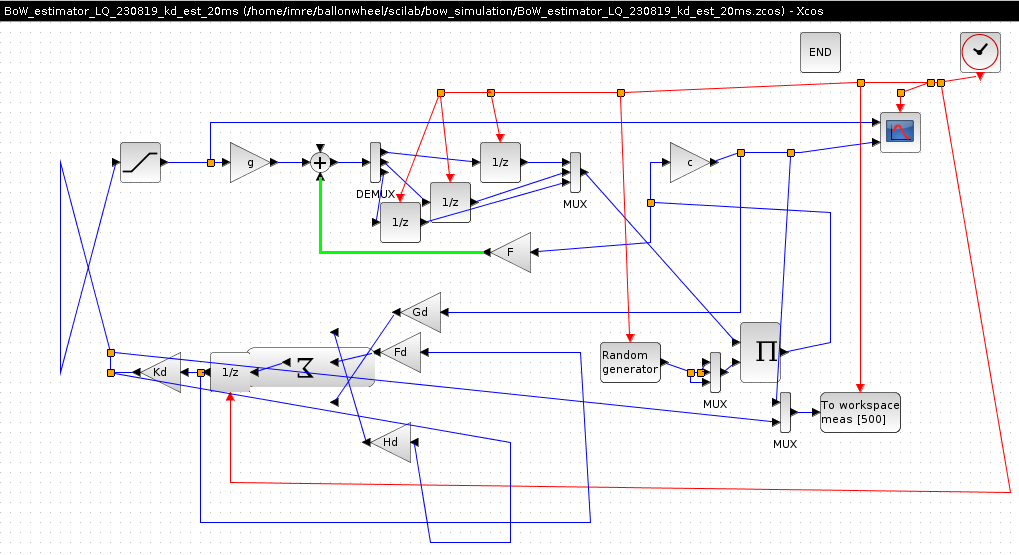
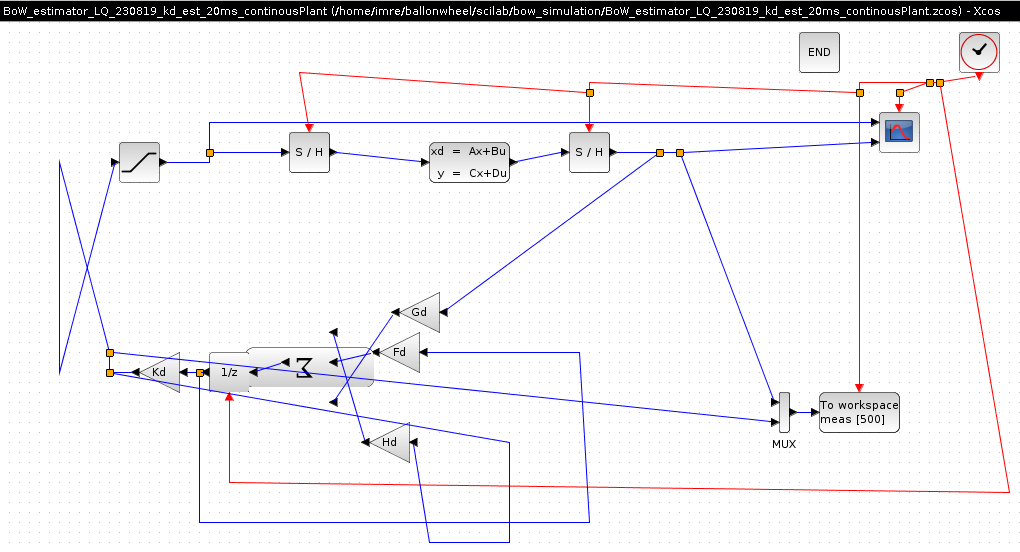
Ábra 3.5-2
Állapot becslő
Ábra 3.5-3
Kapocs feszültség-idő
Pozíció-idő
A szakaszról a korábbiakban kiderült, hogy adott szabályozási pontosság (kilengés) mellett egy gyengébb erőforrással rendelkező szabályozó is elláthatja a feladatot. A mindenki asztalán megtalálható PC erre alkalmasnak tűnik némi megkötéssel. Nem lesz valós idejű, de ha nem sűrű és nagy a dTs (jitter), akkor a robosztus szabályozó kezelni tudja a problémát.
Olyan szabalyozot szeretnek tervezni, amely ‘free numerical-computing-programmal’ (Scilab, Octave, Python) van lekezelve es az aktualas / erzekeles van csak implemntalva beagyazott rendszerben.
A rendszer megvalósítására különböző opensource / kereskedelmi lehetőségek vannak, az elvárásoktól függően. A könyv céljának megfelelően a nyílt forráskódú rendszerekkel dolgozok.
Az alábbi táblázat a tipikus paramétereket foglalja össze.
Rendszer gyarto |
ADC/DAC |
Samling time |
ár |
Scilab+RTAI+BIOE |
12bit |
1kHz |
open |
Scilab+X2C |
8bit |
50Hz |
open |
Scilab+serial+uCx |
8bit |
100Hz |
open |
SoC LPT kernel space |
16bit |
10kHz |
open |
PLECS RTbox |
12bit |
100kHz |
8k EUR |
Speedgoat |
12bit |
100kHz |
20k EUR |
DSpace |
? |
? |
? |
Kép - Rendszerek összehasonlítása
RTAI: https://www.rtai.org/?About_RTAI-Lab
X2C: https://x2c.lcm.at/screenshots/
Scilab serial + uC: https://atoms.scilab.org/toolboxes/wgserialxcosio/16.04.1
uC2: https://www.ti.com/tool/LAUNCHXL-F28379D
PLECS: https://www.plexim.com/products/rt_box
Matlab Speedgoat: https://www.speedgoat.com/products-services/real-time-target-machines/performance
Matlab DSPACE: https://www.dspace.com/en/pub/home/products/hw/simulator_hardware/scalexio/scalexio_labbox.cfm#176_29839
BIOE: http://bioe.sourceforge.net/
Soc:
Raspberry Pi: https://www.raspberrypi.com/
Beagle Bone: https://beagleboard.org/bone
Feladat |
Eszköz |
Megjegyzés |
Érzékelő és beavatkozó processzora |
Arduino Nano |
Ts=20msec, 115200 baud, 3 bájt frame hossz, ADC 8bit, PWM 8bit |
Szabályozó processzora |
RasperryPi-Zero2w |
4 mag, 1Ghz, 512kRAM 1mag foglalva a szabályozónak |
Távolság érzékelő |
BALLUFF BOD 21M-LA04-S92 |
2.5msec, analóg 10V, lézer, 500mm, 500um |
Állandó mágnesű szinuszmezős szinkron hajtás motor |
36V 300W 46 mágnes, 3*17 tekercs, 22col |
Hat lépéses blokk kommutáció HALL szenzorok alapján |
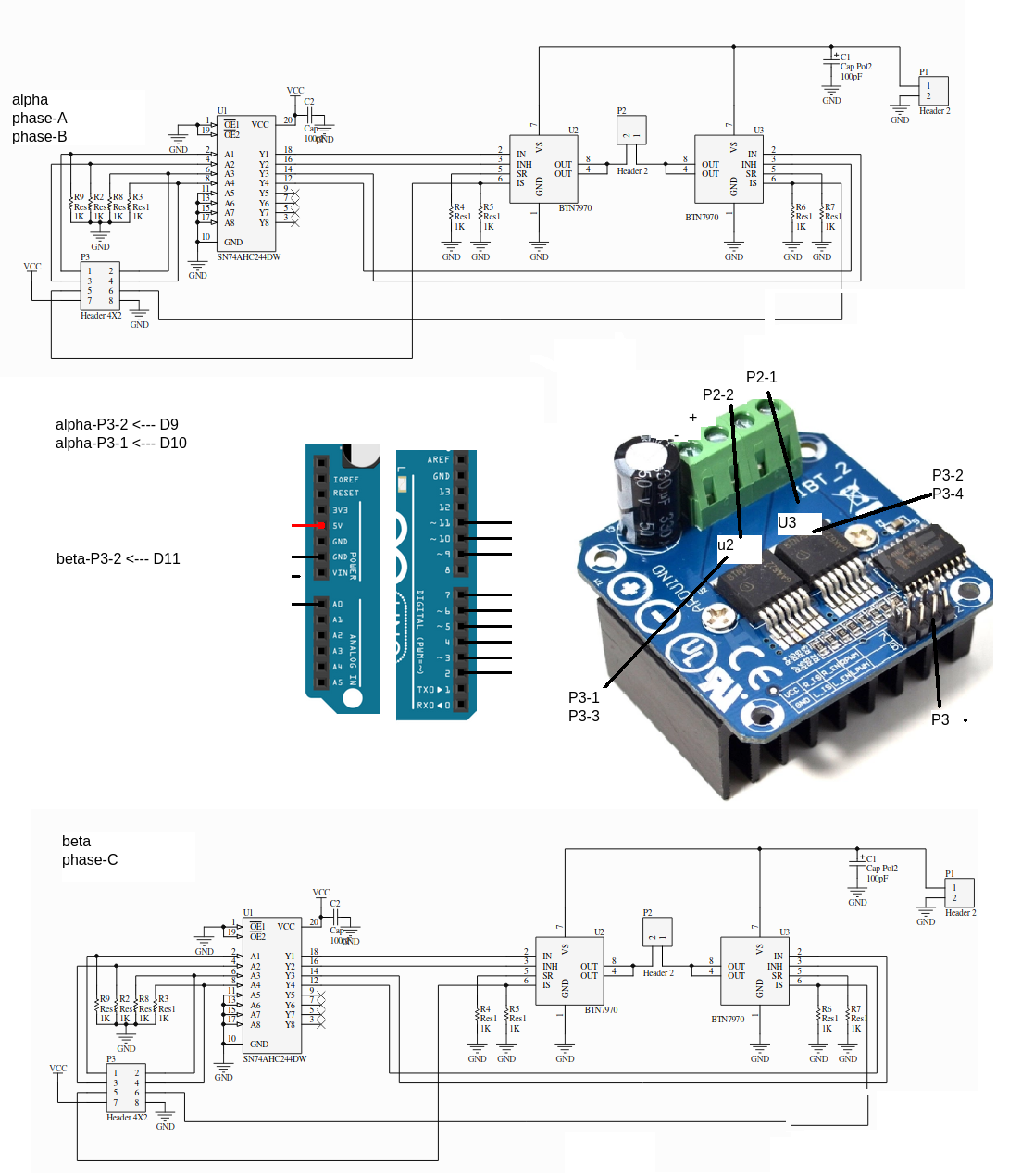
Inverter |
2db * BTS7960-M |
48V, 43A, 1usec deadtime |
A RaspberryPi-Zero2w, Linux-Debian környezet alkalmasnak tűnt a feladat megvalósítására, ahol egy mag van a szabályozó részére lefoglalva. A Raspberry-n Octave szkript-en fut a szabályozó algoritmus, amiben az UART kommunikációhoz az “instrument-control” csomag [7] megfelelő.
A BALLUFF távolság érzékelőt és a motor hajtás invertert egy Arduino Nano kezeli, ami az UART-tx interfészen ütemezi a szabályozót, majd az UART-rx vonalon várja a szabályozó választ, amit az inverter-nek továbbít duty cycle, kapocsfeszültség formájában. Az Arduino elvégzi a hat lépéses motor kommutációt a kapott HALL szenzorok jelei alapján.
A Raspberry Zero2w rendelkezik wifi interfésszel, tehát SSH programmal csatlakozhatunk az eszközhöz, aminek segítségével könnyen elérhetővé válik például az Octave install, git repository, html szerver, GCC cross compile az Arduino CLI [8], tehát a teljes fejlesztő környezet díjmentes, open-source és kis erőforrásigényű, konzolból elérhető. Természetesen a Raspberry lecserélhető egy megfelelően erős asztali számítógépre is.
A rendszer tovább fejleszthető a realtime Linux [13] irányába is, az igényektől függően. Komolyabb real time igények esetén, mint például állandó mágnesű szinkron motor mezőorientált nyomaték szabályozása, a mikrokontrolleres környezet célravezetőbb a perifériák gyors kezelése érdekében.
—-o—-
Problema
A Scilab,Xcos + PC, grafikus window jol mukodik, viszont a ‘Scilab-cli’ sem fut ARM architekturan (PC-n rendben mukodott), mert a TCL-t PC-re szánták. → Octave hasznalata.
A Python control lib + Arduino lib tetszik, de emlekeim szerint nem volt egyszeru a fuggosegek kielegitese telepiteskor, masreszt Ts>50ms-et sikerult UART kommuikacioban elerni, nem valasztottam, de jo irany lehet.
Garfikus window feluleten, szkopok hasznataval remekul lathatoak a belso valtozok es aktuator motor feszultseg jel.
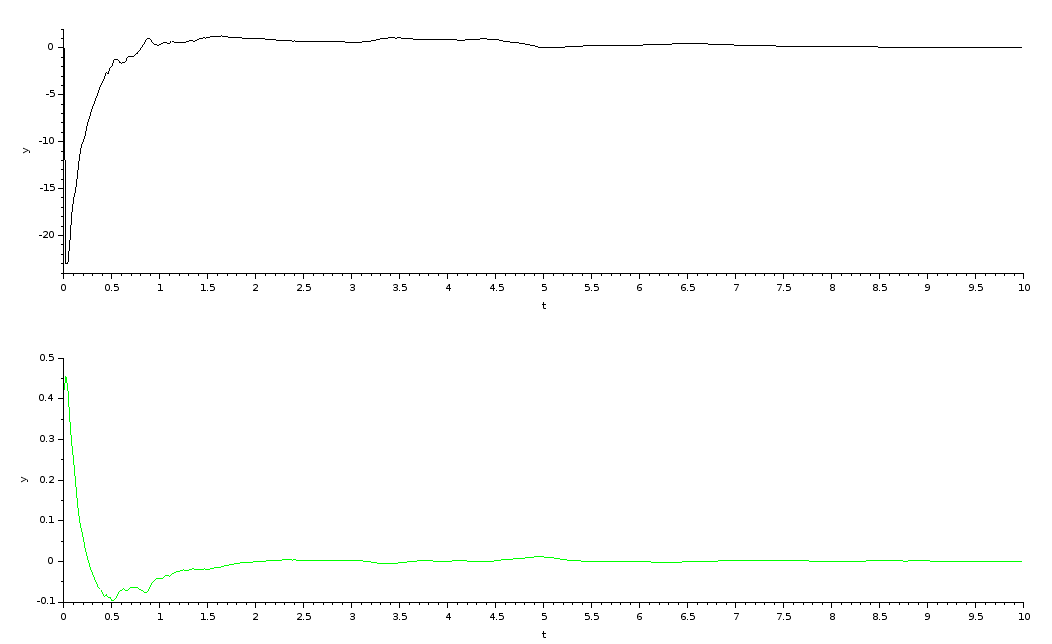
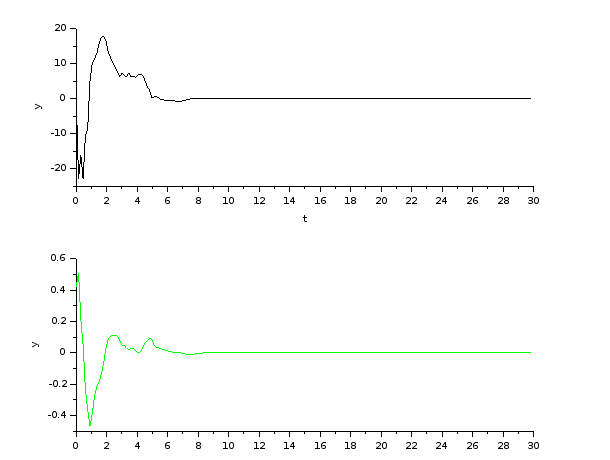
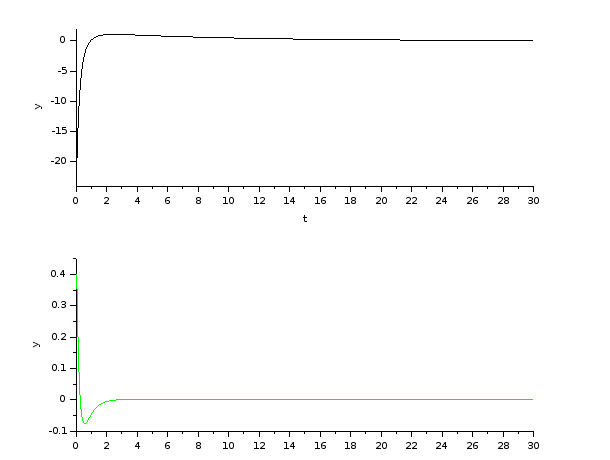
>./ballonwheel/scilab/bow_simulation/BoW_230819_discr20ms.sce
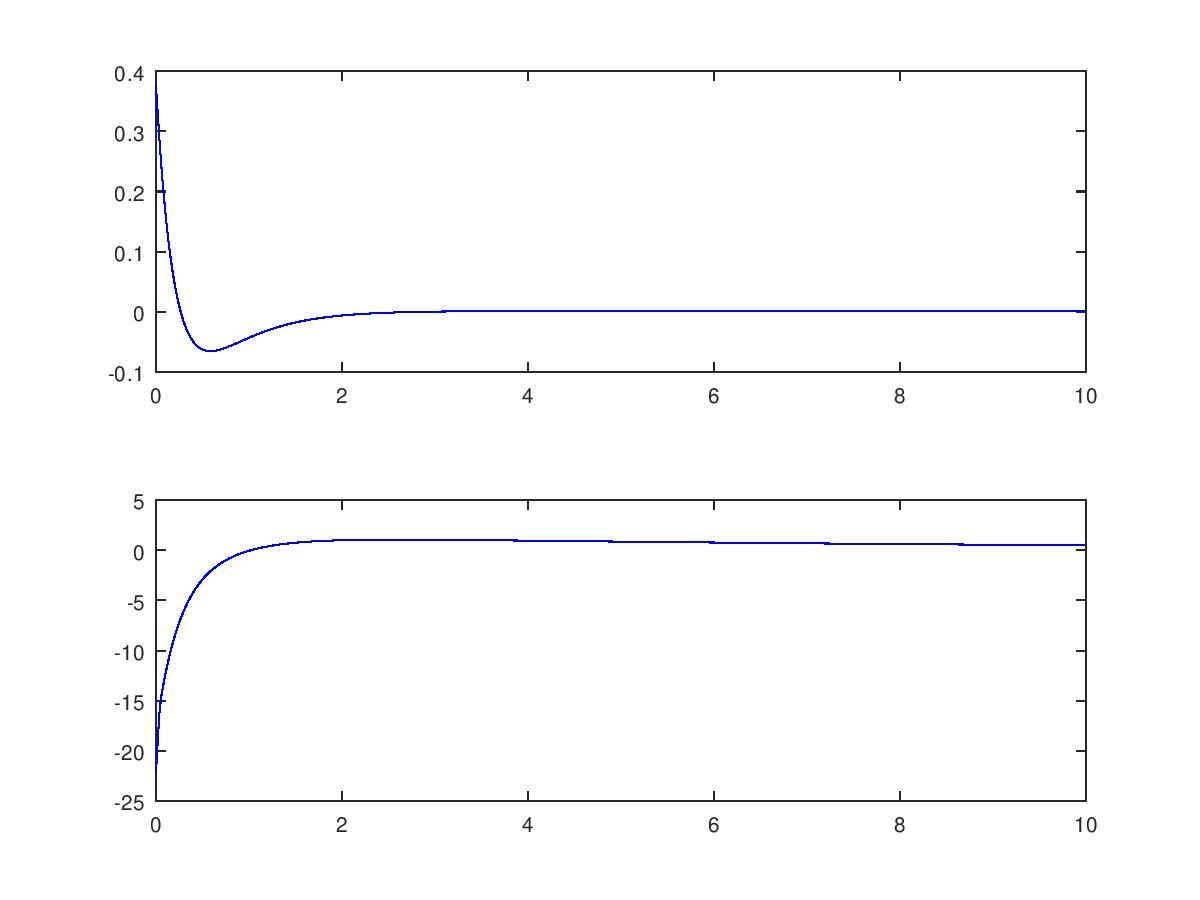
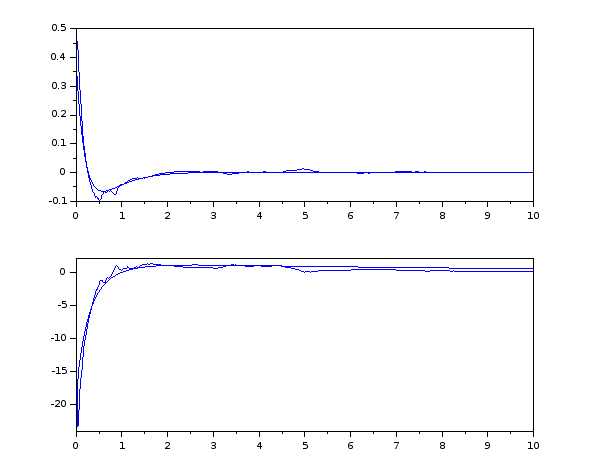
Az x(3) initial erteke 0.4[rad].
Kepx - teljes vcs, felul motor fesz(u[V]), alul pozicio(x[rad])
>./ballonwheel/scilab/bow_simulation/BoW_230819_discr20ms.sce
Adatsor generalasa xcos-bol, mert meas.values es maes.time az xcos modellben le lett generalva:
>csvWrite(meas.values, “/home/imre/ballonwheel/scilab/bow_simulation/meas1.values”)
>csvWrite(meas.time, “/home/imre/ballonwheel/scilab/bow_simulation/meas1.time”)
Itt arrol van szo, hogy meddig lehet csokkenteni a Ts-t, hogy meg valami ertelmeset csinaljon a rendszer?
Itt azt tudjuk megvizsgalni, hogy a szakasz milyen minimum beavatkozasi idot kepes elviselni.
Vegyuk eszre, hogy a kulonbozo Ts -hez pl. kulonbozo Fd matrix tartozik!
Ts=20msec
--> Fd
Fd =
0.3234495 0.0000853 -0.0000183
-0.2148639 1.0021797 -0.2185513
-0.0025432 0.0200145 -0.0024805
-o-
Ts=150msec
--> Fd
Fd =
-0.0000275 0.0014552 -0.0021628
-0.3482255 1.1239824 -1.6808812
-0.0433773 0.156157 -0.2322016
Itt mar oszcillalva all be, tovabb novelve Ts = 200msec eseten mar nem kepes beallni.
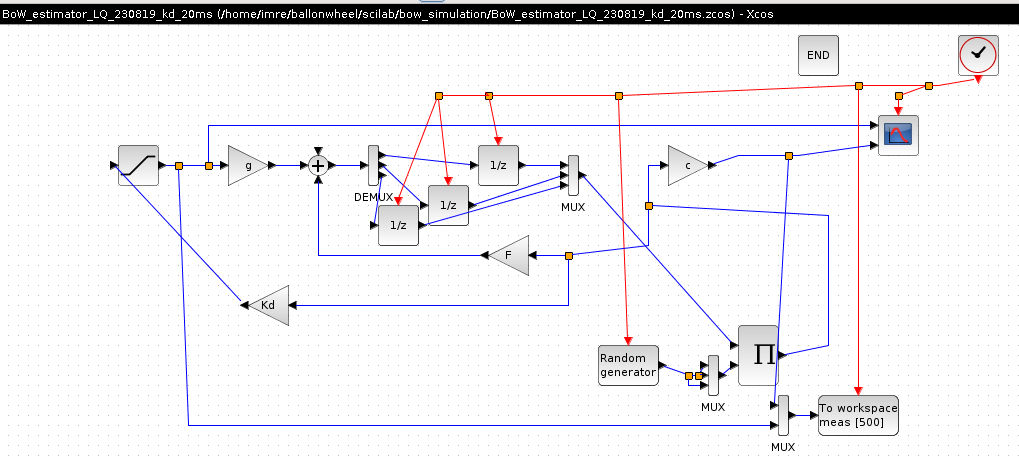
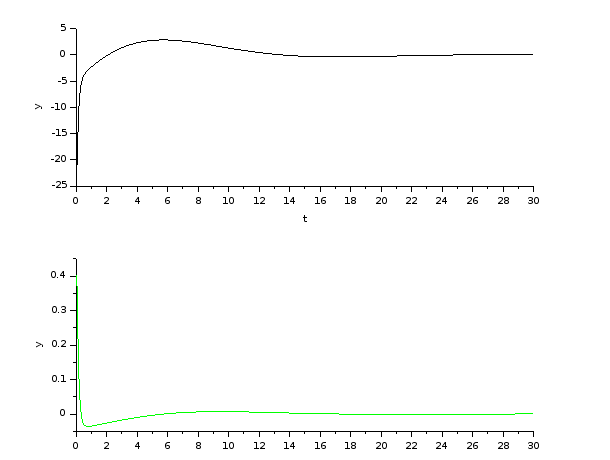
Kepx, diszkret szakasz es kontroller modell becslovel, Ts=150msec, oszcillalva all be
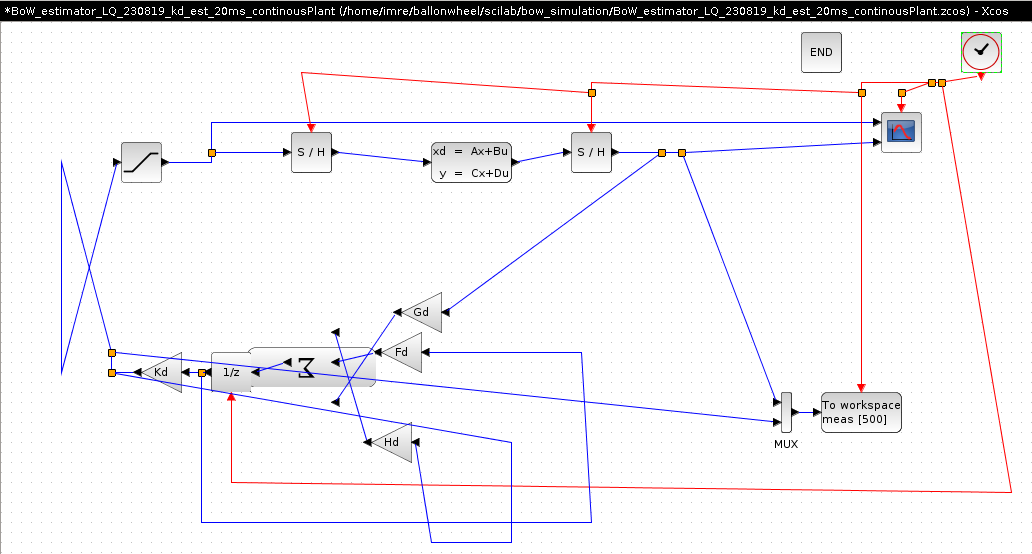
Kepx, folyamatos ideju szakasz model es diszkret kontroller becslovel
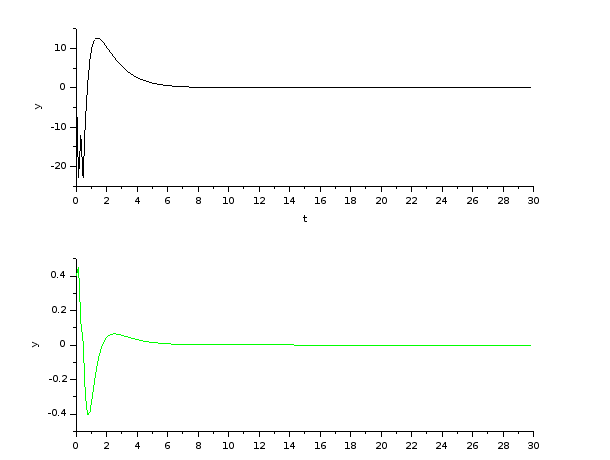
Kepx, folyamatos ideju szakasz modell es diszkret kontroller becslovel, Ts = 150msec
Itt arrol van szo, hogy a diszkret idobe valo attereskor (ABCD → gFcd) megadott Ts-tol eltero Ts-sel hivogatjuk a kontroller algoritmust, akkor mi tortenik?
Ts - ezzel az idovel lett kiszamolva a diszkret plant: BoW_ssd=dscr(BoW_ss, 0.02), //20msec
Tcall - ezzel az idovel hivogatjuk a kontrollert → szimulacioban az “ora”.
Kovetkeztetes: A Tcall viszonylag kis novelesevel, mar hamar labilis lesz a rendszer.
Fontos, hogy a szakasz folyamatos idoben van szamolva es a hozza tartozo becslo diszkretizacio Ts=20msec helyett Tcall=30msec eseten mar oszcillal a rendszer.
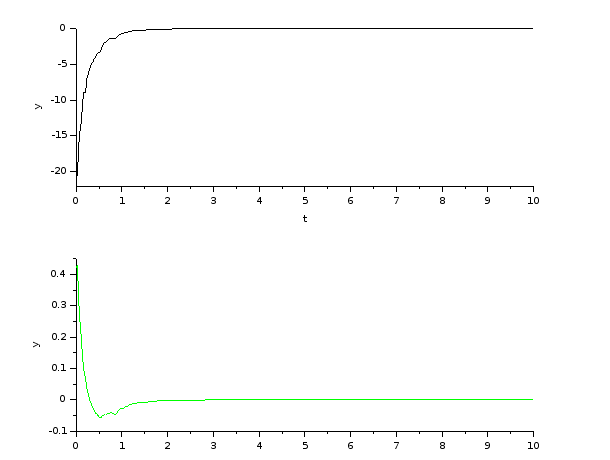
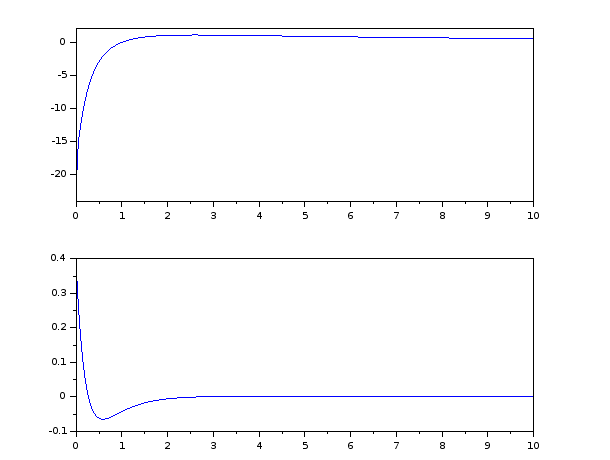
Kepx- becslovel, Ts=20msec, Tcall=20msec → Tsettle=2sec
Kepx- becslovel, Ts=20msec, Tcall=30msec → Tsettle=oszcillal
‘./ballonwheel/scilab/bow_simulation/plantFeedback_discrete.sce’
x = [0;//ww
0;//w2
0.4];//fi2
u = 0;
sum_zn1=[0;0;0];
i=0;
while i<500
i=i+1;
if((x(3)<%pi/2) && (x(3)>-%pi/2))then //vegallas
disp(i)
//controller
u=Kd*x;//<-------------------------------------------------teljes vcs
//estimator
//sum_zn1=Fd*sum_zn1+Gd*x(3)+Hd*u;
//u=Kd*sum_zn1;
if(u>24)then
u=24;
end
if(u<-24)then
u=-24;
end
disp("u")
disp(u)
meas.values(i,1)=u;
//plant
xp=F*x+g*u;
x=xp;
disp("x")
disp(x)
meas.values(i,2)=x(3);
meas.time(i)=(i-1)*0.02;
//y=C*x+D*u;
//disp("y")
//disp(y)
end
end
subplot(2,1,1)
plot(meas.time, meas.values(:,1))
subplot(2,1,2)
plot(meas.time, meas.values(:,2))
csvWrite(meas.values, '/home/imre/ballonwheel/scilab/bow_simulation/meas2_values.csv')
csvWrite(meas.time, '/home/imre/ballonwheel/scilab/bow_simulation/meas2_time.csv')

‘./ballonwheel/scilab/bow_simulation/plantFeedback_discrete.sce’
-o-
//sof
x = [0;//ww
0;//w2
0.4];//fi2
u = 0;
sum_zn1=[0;0;0];
i=0;
while i<500
i=i+1;
if((x(3)<%pi/2) && (x(3)>-%pi/2))then //vegallas
disp(i)
//controller
//u=Kd*x;
//estimator
sum_zn1=Fd*sum_zn1+Gd*x(3)+Hd*u;
u=Kd*sum_zn1;
if(u>24)then
u=24;
end
if(u<-24)then
u=-24;
end
disp("u")
disp(u)
meas.values(i,1)=u;
//plant
xp=F*x+g*u;
x=xp;
disp("x")
disp(x)
meas.values(i,2)=x(3);
meas.time(i)=(i-1)*0.02;
//y=C*x+D*u;
//disp("y")
//disp(y)
end
end
subplot(2,1,1)
plot(meas.time, meas.values(:,1))
subplot(2,1,2)
plot(meas.time, meas.values(:,2))
csvWrite(meas.values, '/home/imre/ballonwheel/scilab/bow_simulation/meas3_values.csv')
csvWrite(meas.time, '/home/imre/ballonwheel/scilab/bow_simulation/meas3_time.csv')
//eof
-o-
Linux, Scilab script, XCOS, WGSerial - ArduinoNano, BTS_Inverter
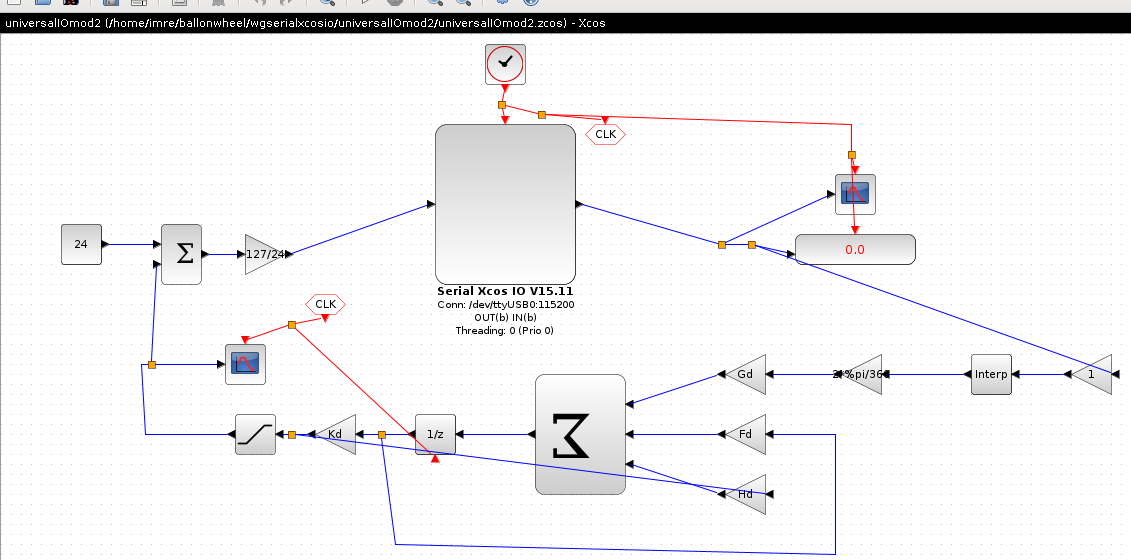
Ahhoz, hogy a modellbol elerheto legyen a motor es a tavolsag erzekelo egyesiteni kellett a motor hajtast, a tavolsag erzekelo ADC-t es a WGserail kodot.
https://drive.google.com/file/d/11ZUFCLI1WgMBgq3CjRYAuPaKNTTK7fin/view?usp=drive_link
A cel az, hogy a linux startup utan automatikusan induljon a kontroller- Ezt scilab-cli-vel nem sikerult elernem (arm-on), lasd korabban. Octave alkalmasnak tunik.
Az inicializacios szkript atirasat lasd a mellekletben, ami a fullrf() fv-t kiveve siman ment.
x = [0;#ww
0;#w2
0.4];#fi2
u = 0;
sum_zn1=[0;0;0];
i=0;
while i<500
i=i+1;
disp(i)
#controller
#u=Kd*x;
#controller+estimator
sum_zn1=Fd*sum_zn1+Gd*x(3)+Hd*u;
u=Kd*sum_zn1;
if(u>24)
u=24;
end
if(u<-24)
u=-24;
end
disp("u")
disp(u)
xp=F*x+g*u;
x=xp;
disp("x")
disp(x)
#y=C*x+D*u;
#disp("y")
#disp(y)
meas.values(i,1)=x(3);
meas.values(i,2)=u;
meas.time(i,1)=(i-1)*0.02;
endwhile
subplot(2,1,1)
plot(meas.time, meas.values(1:end,1),'g');
hold on;
subplot(2,1,2)
plot(meas.time, meas.values(1:end,2),'b');
pause(10)
#measAll=[meas.time meas.values];
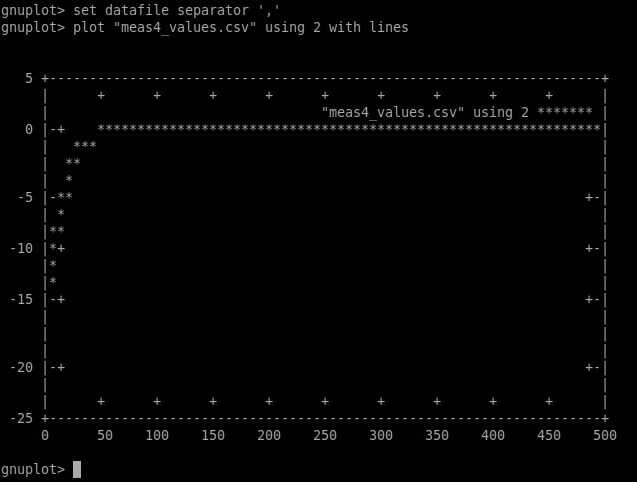
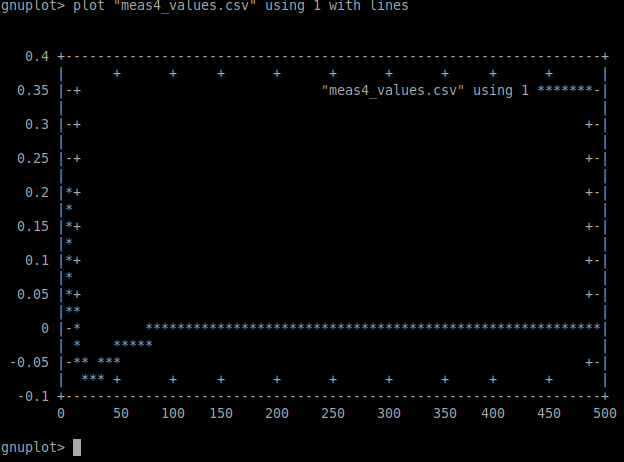
csvwrite('./meas4_values.csv',meas.values)
csvwrite('./meas4_time.csv',meas.time)
#csvwrite('./mAll.csv',measAll)
-o-
set terminal dumb
plot sin(x)
https://raymii.org/s/tutorials/GNUplot_tips_for_nice_looking_charts_from_a_CSV_file.html
gnuplot> set terminal dumb
gnuplot> set datafile separator ','
gnuplot> plot "C:/Users/dio2bp/Desktop/tmp/bow/mAll.csv" using 2 with lines
gnuplot> plot "C:/Users/dio2bp/Desktop/tmp/bow/mAll.csv" using 3 with lines
Plot csv-bol
meas1: Scilab xcos
meas2: Scilab szkript teljes vcs
meas3: Scllab szkript becslo
meas4: Octave szkript becslo
meas1_time=csvRead('/home/imre/ballonwheel/scilab/bow_simulation/meas1_time.csv')
meas1_values=csvRead('/home/imre/ballonwheel/scilab/bow_simulation/meas1_values.csv')
meas2_values=csvRead('/home/imre/ballonwheel/scilab/bow_simulation/meas2_values.csv')
meas3_values=csvRead('/home/imre/ballonwheel/scilab/bow_simulation/meas3_values.csv')
meas4_values=csvRead('/home/imre/ballonwheel/scilab/bow_simulation/meas4_values.csv')
subplot(2,1,1)
plot(meas1_time, meas1_values(:,1))
plot(meas1_time, meas2_values(:,2))
plot(meas1_time, meas3_values(:,2))
plot(meas1_time, meas4_values(:,1))
subplot(2,1,2)
plot(meas1_time, meas1_values(:,2))
plot(meas1_time, meas2_values(:,1))
plot(meas1_time, meas3_values(:,1))
plot(meas1_time, meas4_values(:,2))
Korabban a Scilab Xcos megoldasnal a modellben az idozito megoldotta a 20msec-es loop-ot es a WGserial library megoldotta a kommunikaciot.
Itt a szkriptes megoldasnal
Linux:
Octave loop,
instrument-control package: fread(), fwrite()
Arduino:
Uart kommunikacio,
6step hajtassal integralni,
tavolsag mero ADC-vel integralni
Scheduler - ADC utem - Ts=20msec-100msec
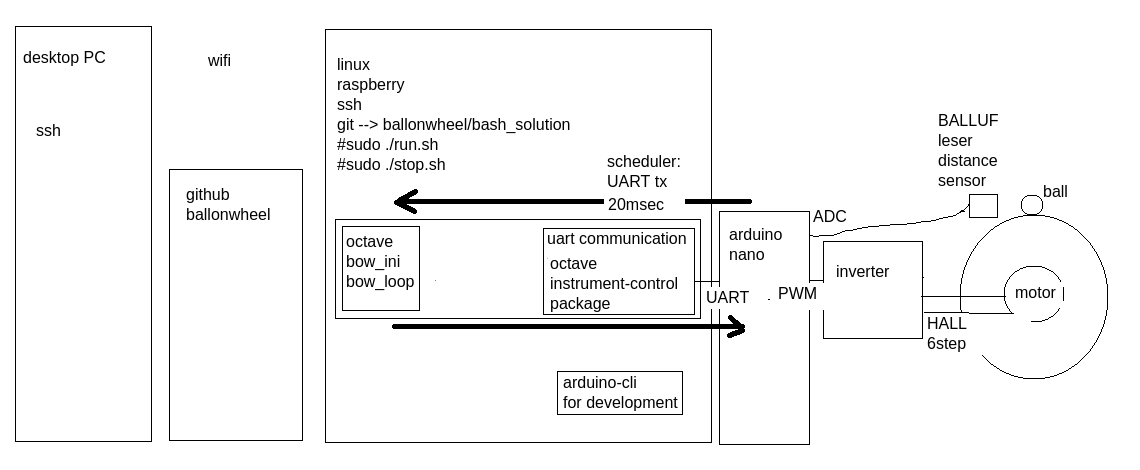
Kepx, teljes rendszer osszallitas
Ahogy az erzekelonel irtam, az ADC interrupt-jahoz igazodik a rendszer uteme, tehat ez a sampling time, Ts. Az arduinoNano-ADC egyszeruen csak kikuldi az 3 byte-os keretet es varja a 3 bajtos keretet valaszul.. A fentiekbol kovetkezik, hogy linux-on futo rendszernek a Ts ido alatt ki kell szolgalnia a kommunikaciot es a kontroller szamolast.
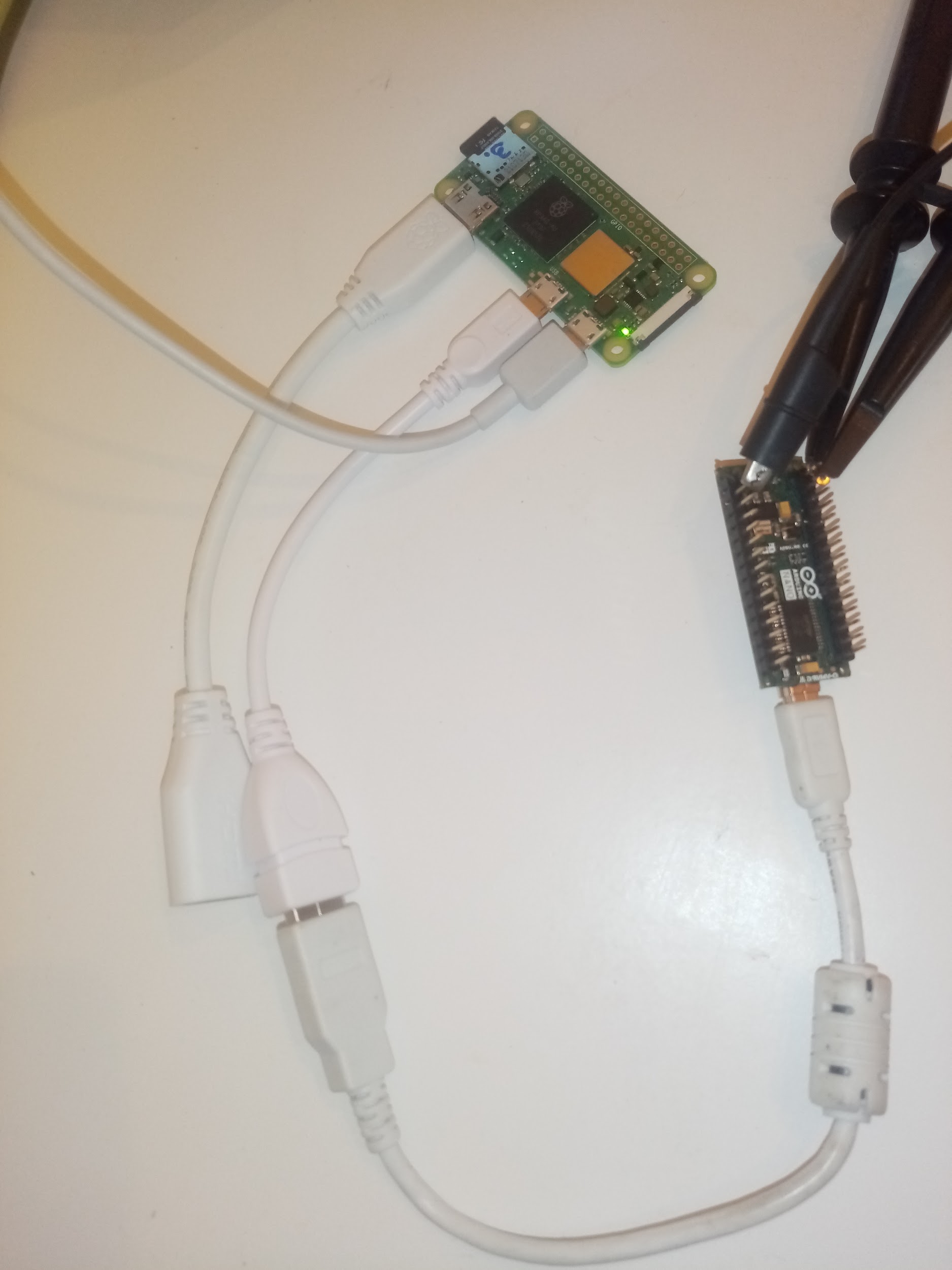
Tapasztalat alapjan 5msec-ig le lehet menni (rPiZero2w, 1Ghz, 4 core, 512M) 10ppm hibaval sajat C kod alapjan, mig octave-intrument-control package-val ez 20msec.
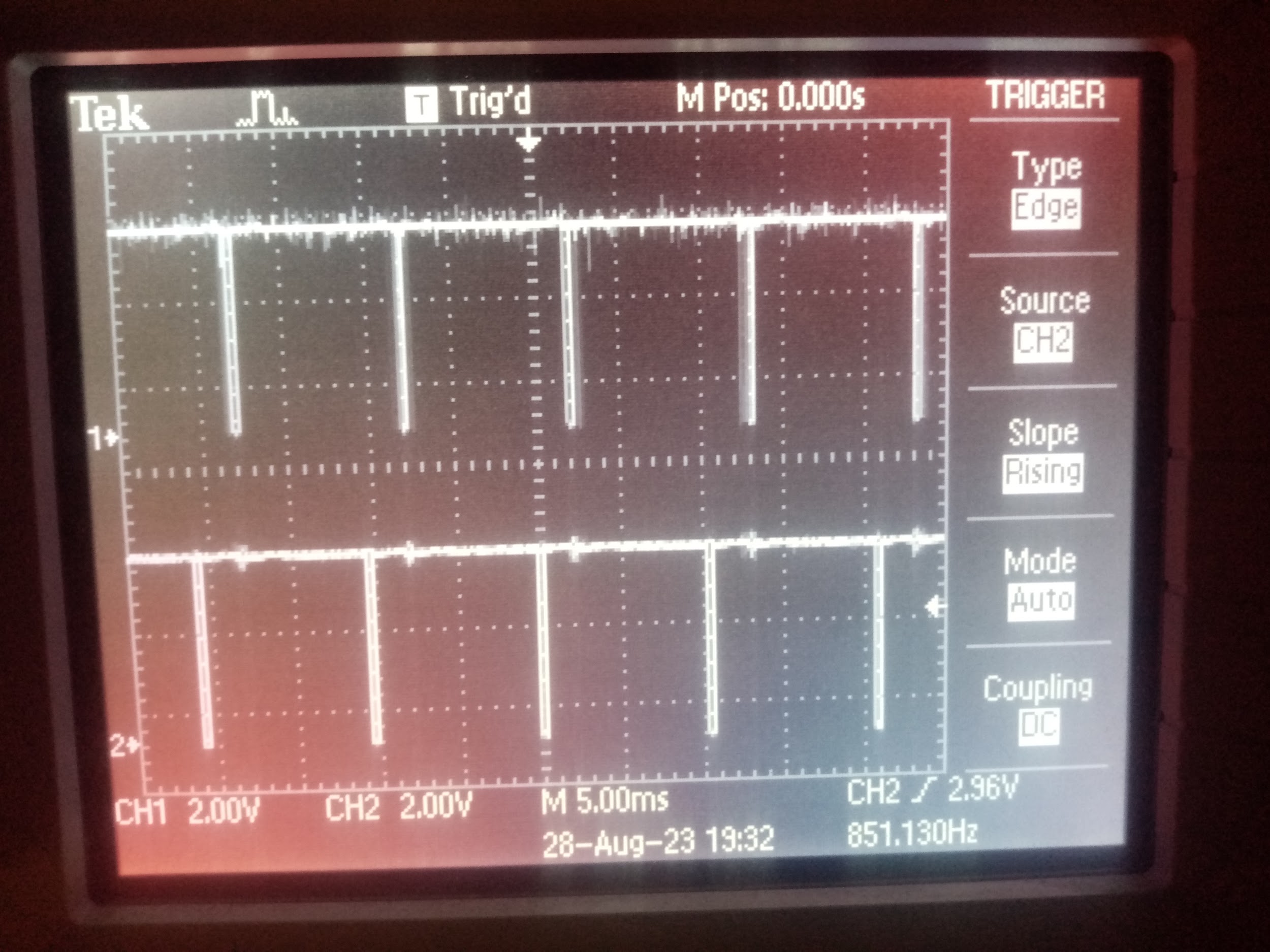
Arduino, CH1:rx CH2:tx
Habar a PC, SoC - Linux megoldas egyszeruve teszi a kontroller megvalositast, de nem egyszeru vele elerni a real time-ot (RTAI). Kozelito megoldasnak a soft real time Linux jo lehetoseg.
1, RT Linux: PC-re Debian alatt “apt-get install linux-image-rt-amd64” paranccsal konnyen elerhet, de ARM-ra kulon kernel-t kell forditani.
2, Tovabbi lehetoseg a core-ok hasznalatanak meghatarozasa a processzek szamara, lasd a kovetkezo fejezetben.
3, prioritas beallitasa: >nice –20 octave script.m
http://comfilewiki.co.kr/en/doku.php?id=comfilepi:improving_real-time_performance:index
sudo apt install cpufrequtils
sudo cpufreq-set -g performance
sudo cat /sys/devices/system/cpu/cpu[0-3]/cpufreq/cpuinfo_cur_freq
vcgencmd measure_clock arm
First, add isolcpus=nohz,domain,managed_irq,3 irqaffinity=0-2 nohz_full=3 rcu_nocbs=3 to the /boot/cmdline.txt file. This will prevent Linux from allocating the 4th core to most process, interrupt handlers, and kernel threads. Reboot for the change to take effect.
Get the PID - bash-bol majd
sudo taskset -cp 3 1176
sudo chrt -f -p 1 1176`
Na ez utan nem lehet kommunikalni a rasberryvel
Ezt inkabb nem javasoljak, hanem ,legyen sleep, ha meg kell varni:
sudo sh -c "echo -1 > /proc/sys/kernel/sched_rt_runtime_us"
Problema
1, Scilab szkript nem megy az uart lib, mert TLC csak grafikusban megy - octave kell
2, Jo lett volna megoldani bash-bol az UART kommunikaciot az egyszeruseg kedveert.
Habar mukodik a dolog, de nem robosztus (uart_rxtx.sh), marad a C code (main.c).
Az is nagy tapasztalat, hogy egy processzben nem lehet megoldani az uart kuldest-fogadast, tehat egyszerubb volt az arduino oldalrol utemezni es kiszolgalni a kovetkezo beerkezo adatig. Ily modon az arduino oldal a master.
3, uart C code, ezzel el lehet erni az 5msec rx-tx loop-ot
4, octave instrumant-control tool: ez 20msec loop lehet (raspZero2w) → ez lett.
./ballonwheel/bash_solution
./run.sh
Cpu orajel legyen pontosabb
(Magok kivalasztasa, meg nem hasznalom, tesztelni kell)
Startup.sh
Ki kene talalni hol van az arduino ttySB0,1,2…
Chmod 777
Setseial lowlatency, de ez csak eredeti FTDInal megy, de a kinaival is megy a 20 msec
Octave prioritas magasra allit
Octave ini es loop start
Kommunikacio start
Megjegyezni a processz IDket
./stop.sh
Kill octave
./help.sh
Egy aprocska manual
Most hogy a modell szimulacioban fut Octave szkriptben atterhetek a valos setup-ra:
6 step motor hajtas integralas
ADC erzekelo integralas
kalibralas
Octave loop.
Adc → bow_position→ szogelfordulas
U → scale→ bow_motor
Gnuplot realtime
https://octave.sourceforge.io/arduino/package_doc/Protocol-based-I_002fO-Overview.html
https://wiki.octave.org/Arduino_package
https://docs.octave.org/latest/
https://drive.google.com/file/d/1QCgao47FQXtr-xK46_ASLiKJgwR6ucpj/view?usp=drive_link
Python control system + uart
https://python-control.readthedocs.io/en/0.9.4/intro.html
Python DSP
https://docs.scipy.org/doc/scipy/reference/signal.html
https://www.electronicwings.com/raspberry-pi/raspberry-pi-uart-communication-using-python-and-c
https://pyserial.readthedocs.io/en/latest/index.html
https://www.hackster.io/vincekok/part-2-uart-serial-communication-python-arduino-0476eb
sudo apt install python3-pip
pip install pyserial
https://problemsolvingwithpython.com/11-Python-and-External-Hardware/11.03-Controlling-an-LED/
ser = serial.Serial('COM4', 9800, timeout=1)
time.sleep(2)
user_input = 'L'
while user_input != 'q':
user_input = input('H = on, L = off, q = quit' : )
byte_command = encode(user_input)
ser.writelines(byte_command) # send a byte
time.sleep(0.5) # wait 0.5 seconds
print('q entered. Exiting the program')
ser.close()
https://www.odoo.com/forum/help-1/how-to-install-pip-in-python-3-on-ubuntu-18-04-167715
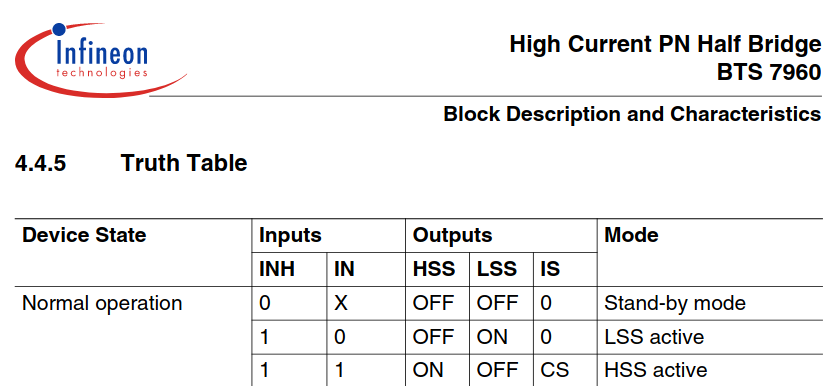
A HUB motor(36V/300W) az aktuátor, amit Hall szenzorral six-step hajtással lehet és elegendő hajtani.
HALL szenzor nélkül lehetne BEMF, BLDC hajtast open-loop inditassal.
Az FOC hajtást szenzorral vagy open-loop indítással pozíció becslovel lehetne hajtani, kisebb nyomatek hullamossaggal, de a jelen problemaban az indito nyomatekra van szukseg, amit legjobban HALL szenzor, six-steppel lehet legjobban elerni. Erdekes megoldas lehetne FOC hajtas a HALL jelek kozti interpolacioval, de erre nincs szukseg.
/******************************
43 6 step drive
44 built from scretch
45 1, choose phases of A, B, C as you want but later insist on
46 A-PH yellow
47 B-PH green
48 C-PH blue
49 A-HALL yellow
50 B-HALL green
51 C-HALL blue
52
53 2, define the cw and ccw direction and insist on
54 definition: torque vector as a right hand rule, so that
55 ha a nyomatek vektor pozitiv es felem nez, akkor az irany: ccw
56 Tehat mot a nyomatek legyen pozitiv a faziskabel bekotesi oldala felol nezve.
57
58
59 3, measure BEMF, A-B, B-C, C-A
60
61
62 4, measure HALL relative to BEMF
63 HALLs are 120degree from each other.
64 HALLs are high at its respective phase is positive half periode 180 degree.
65 Ex.:
66 phase +A-C --> A-HALL
67 phase +A-C --> B-HALL
68 phase +A-C --> C-HALL
69
70 *
71 * * *
72 * * *
73 * *
74 *
******* ****
76 * * *
77 * *******
78
79 4, check and make sure of the microcontroller HALL input order ex.
80 d5 D5 2^0 A-HALL
81 d6 D6 2^1 B-HALL
82 d7 D7 2^2 C-HALL
83
84 5, put vectors on motor and check the HALL signals
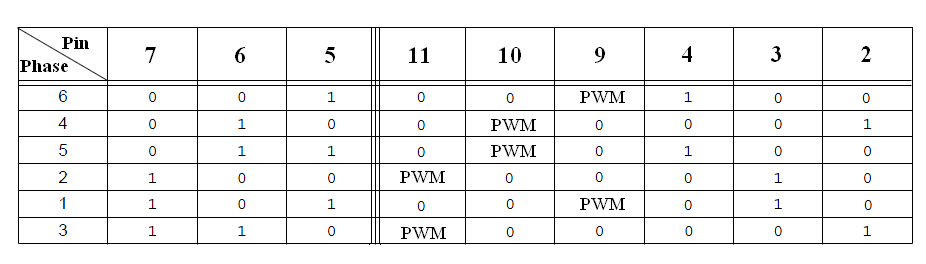
85 [BH_CL] // 0b001 0x1
86 [BH_AL] // 0b011 0x3
87 [CH_AL] // 0b010 0x2
88 [CH_BL] // 0b110 0x6
89 [AH_CL] // 0b101 0x5
90 [AH_BL] // 0b100 0x4
91
92 6, rotate, ex. manually cw and check the HALL step order, ex.
93 5 1 3 2 6 4
94
95 7, creat the commutation table of cw
96 in case 5[AH_BL] -> call 1[AH_CL],
97 in case 1[AH_BL] -> call 3[AH_CL],
98 in case 3[AH_BL] -> call 2[AH_CL],
99 in case 2[AH_BL] -> call 6[AH_CL],
100 in case 6[AH_BL] -> call 4[AH_CL],
101 in case 4[AH_BL] -> call 5[AH_CL],
102
103
104 8, rotate ccw
105 4 6 2 3 1 5
107 9, create the commutation table of ccw
108 call next vector according to direction
109 in case 4[AH_BL] -> call 6[CH_BL],
110 in case 6[CH_BL] -> call 2[CH_AL],
111 in case 2[CH_AL] -> call 3[BH_AL],
112 in case 3[BH_AL] -> call 1[BH_CL],
113 in case 1[BH_CL] -> call 5[AH_CL],
114 in case 5[AH_CL] -> call 4[AH_BL],
115
116
117 9, creat the commutation table of cw
118 in case 4[AH_BL] -> call 6[AH_CL],
119 in case 4[AH_BL] -> call 6[AH_CL],
120 in case 4[AH_BL] -> call 6[AH_CL],
121 in case 4[AH_BL] -> call 6[AH_CL],
122 in case 4[AH_BL] -> call 6[AH_CL],
123 in case 4[AH_BL] -> call 6[AH_CL],
124
125 10, some alignment is necessary whether HALL is properly placed or not relative to stator coils.
[main e44b08b] marad az elozo verzio, mert: arduinov3.ino_ 1, forditva van, mint a konvencio: ccw-4 2 6 3 1 5, ezert cserelni kene, cw-ccw 2, jelenleg forditva vannak ertelmezve a vektorok Hih-low tok veletlenul, ezert jo de ha meforditom, akkor elegge morogva lepeget --> 30for eltolassal szetesik valoszinuleg a low side pwn (invert pwm) megforditja a vektorokat
1 file changed, 716 insertions(+)
OCR1A = duty; // Set pin 9 PWM duty cycle
OCR1B = duty; // Set pin 10 PWM duty cycle
OCR2A = duty; // Set pin 11 PWM duty cycle
https://ww1.microchip.com/downloads/en/Appnotes/00885a.pdf
https://www.microchip.com/stellent/groups/sitecomm_sg/documents/devicedoc/en543044.pdf
https://www.microchip.com/content/dam/mchp/documents/parked-documents/BLDC%20MC%2000957a.pdf
https://simple-circuit.com/arduino-cd-rom-brushless-motor-control/
https://simple-circuit.com/arduino-sensorless-bldc-motor-controller-esc/
https://www.microchip.com/content/dam/mchp/documents/parked-documents/BLDC%20MC%2000957a.pdf
https://www.microchip.com/stellent/groups/sitecomm_sg/documents/devicedoc/en543044.pdf
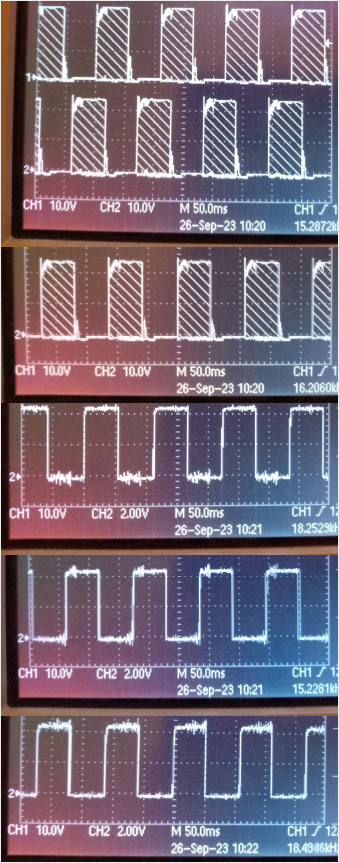
_____________C B A HC HB HA LC LB LA
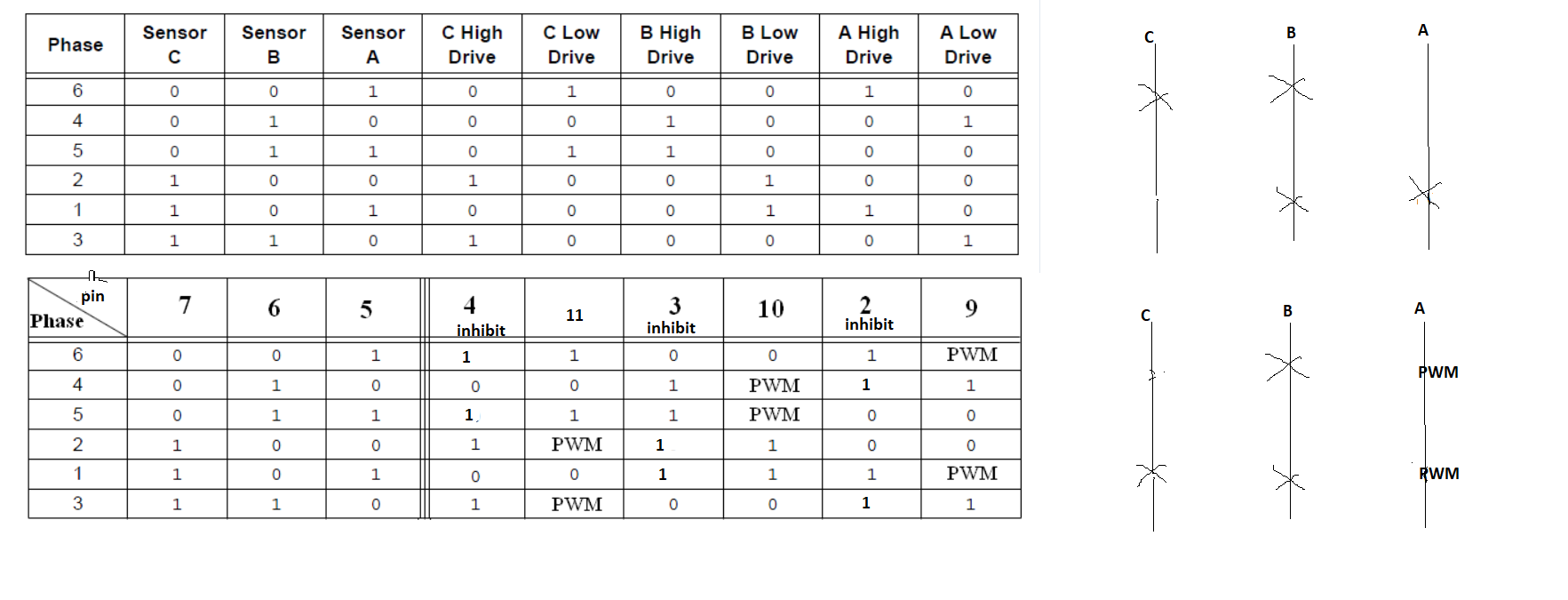
Meres1 CW
Fazis
Sarga → trigg, CH1, tobbi CH2
Zold
Kek
Hall
Sarga
Zold
Kek
if(dir == CW_)
switch(bldc_step){
case 1:
AH_CL();
break;
case 2:
BH_AL();
break;
case 3:
BH_CL();
break;
case 4:
CH_BL();
break;
case 5:
AH_BL();
break;
case 6:
CH_AL();
break;
default:
//PORTD = 0xe0;
break;
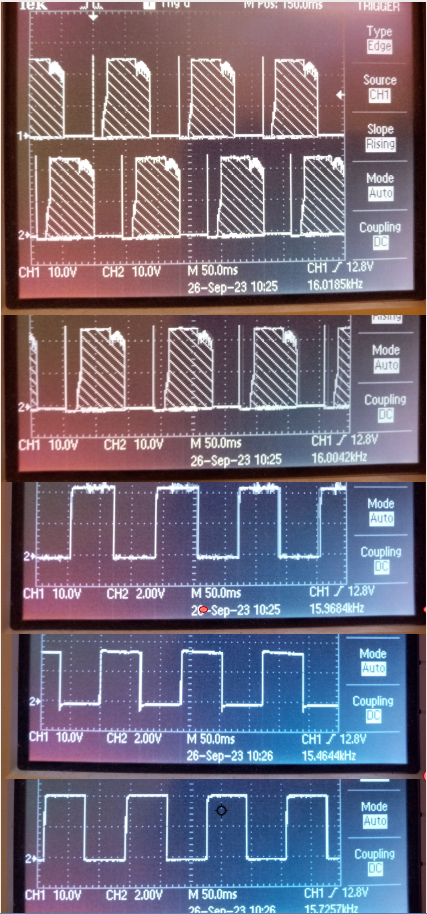
Meres2 CCW
Fazis
Sarga → trigg, CH1, tobbi CH2
Zold
Kek
Hall
Sarga
Zold
Kek
case 1:
AL_CH();
break;
case 2:
BL_AH();
break;
case 3:
BL_CH();
break;
case 4:
CL_BH();
break;
case 5:
AL_BH();
break;
case 6:
CL_AH();
break;
default:
//PORTD = 0xe0;
break;
Arduino Nano ADC ch0 - 8bit - 10khz → scheduler → Ts
Fesz oszto
Felso tagok 2kohm 3.2kohm
Also tagok 4.7kohm
Vegallasok, vizszintes
11,10V 5,000V 330mm 225adc
5,130V 2,270V 201mm 130adc
0,920V 0,397V 095mm 090adc
posx=[0;24;40;64;100;130;160;190;210;245;255];#[ADC8bit]
posy=[-18.0;-17.0;-15.0;-10.0;-5.0;0.0;5.0;10.0;15.0;17.0;18.0];#[fok]
CONTROLRANGE_DEGREE = 13;
CONTROLRANGE = CONTROLRANGE_DEGREE*2*pi/360;



A szabályozó megvalósítást a motor paraméterek (Ls, Rs, Iw, Km, Ke) meghatározása megelőzte, amely a 1. táblázatban található. A motor szemrevételezése és típusa alapján egy 36V-os 300W-s szinuszmezős állandó mágnesú szinkron HUB hajtás motor (PMSM) kerül alkalmazásra.
A ‘Ke = U peak / w mech’ értéke a BEMF üresjárási kapocsfeszültségből és a motor ismerete alapján, (46 mágnes, tehát 23 póluspár és 3*17 állórész tekercs) meghatározható. A ‘Km = 3/2 Ke’ a PMSM motoroknál ismert [9]. Az Rs, Ls értékek RLC méréssel kerültek meghatározásra, míg Iw inercia arányossággal történt: ΣM = Iw * βw1 , ΣM = Iw * βw2
Tehát meg kell mérni a kerék fordulatszám felfutási idejét álló helyzetből maximális értékre terhelés nélkül, majd ismert terheléssel. A felfutási idő valamint a terhelő súlyok ismeretében a kerék tehetetlenségi nyomatéka jó közelítéssel meghatározható. A terhelő súlyokat a kerék peremén a lehető legjobban elosztva kell elhelyezni [10].
Iw / d Iw = Türes / dT, ahol d Iw = Iw_terhelt – Iw és dT = Tterhelt - Türes (5.1)
A súrlódási erő (rv) kis értékre lett becsülve, amit bizonyára tovább lehetne vizsgálni, mint ahogy a “cogging” nyomatékból származó indítónyomaték hullámzást is. Ezen hibák a szabályozó nagyobb kitéréseit okozzák.
A szoftver elérhető és működtethető az alábbiak szerint:
>git clone https://github.com/ballonwheel/ballonwheel.git
>cd ballonwheel/bash_solution_only_octave
>sudo ./run.sh
>sudo ./stop.sh
A kifejlesztésre került eszköz jól használható kiállításokon irányítástechnikai demonstrációs célra valamint szakmai gyakorlati órákra a fejlesztés különböző lépései a modellalkotás, szabályozó tervezés és megvalósítás, hangolás, motor identifikáció és motor hajtás ismereteinek elsajátítására. A kialakított rendszer esetleg alapja lehet egy asztali, kisebb változat is vagy “DIY” egységcsomag amely motiváló lehet a diákok számára.
[1] Control of the Ball on the Wheel System, R.W. van Gils, DCT 2007.010.
Technische Universiteit Eindhoven, Department Mechanical Engineering,
Dynamics and Control Technology Group, Eindhoven, February, 2007
[2] Lindert, Sven & Höfler, Christian & Schlacher, Kurt. (2018). Nichtlineare
Regelung mit einem Raspberry PI: Automatisierung des Versuchsaufbaus ,,Ball
auf Rad“ mit einem Raspberry PI und offener Hard- und Software. e & i
Elektrotechnik und Informationstechnik. 135., 10.1007/s00502-018-0613-8.
[3] Keviczky, Szabályozástechnika, Szent István Egyetem, Győr
[4] Lantos Béla, Irányítási rendszerek tervezése, 11. Szabályozások tervezése
állapottérben
[5] Openeering, LQ, Online:
http://www.openeering.com/sites/default/files/Inverted_Pendulum.pdf
[6] Matlab, Online:
https://www.mathworks.com/help/control/ref/pidtuner-app.html
[7] Octave, Instrumentation tool, Online:
https://octave.sourceforge.io/instrument-control/package_doc/
[8] Arduino cli: Online: https://arduino.github.io/arduino-cli/0.35/
[9] Halász sándor, Villamos hajtások, ISBN 963 450 5171, (7.14)
[10] Gilber, Sólyom, Kocsányi, „Merev testek kinematikai leírása,” Fizika
Mérnököknek, Műegyetemi kiadó
[11] Octave, symbolic, Online: https://octave.sourceforge.io/symbolic/
[12] Repülőgépek egyszerű referenciajel követő szabályozóinak tervezése
LQ Servo módszerrel, Matlab/Simulink környezetben, Bauer Péter
BME Közlekedésautomatikai Tanszék
[13] RTAI, Online: https://www.rtai.org/
(vegignezni: scilab help control system CACSD osszes parancs)
(alap konyv: Keviczky)
Atv fv levezetese
Atv fv alakok
Feedback atv fv
Tipus szam
Rend szam
Mit abrazol az S plane, mit lehet leolvasni rola?
Az S plane-bol hogyan lehet kovetkeztetni a rendszer viselkedesere, pl jobb oldali komplex zerus?
Bode, bode sketch
Nyquist, sketch
Es mekkora beavatkozo jelet kell alkalmaznom?
Es hova erdemes athelyezni a polusokat?
Gyokhely gorbe, Root locus avagy evans
Root locus sketch
PID stabil tervezes
PID instabil tervezes
Robosztus tervezes
—
Atviteli fv = kimenet / bemenet
A DIRAC deltara adott valaszt a sulyfv w(t)
Az egysegugrasra adott valasz az atmeneti fv v(t)
Keviczky 59.oldal, zerus, polus alak k(s-z1)(s-z2)/(s-p1)(s-p2)
Idoallandos alak: 1+ts/1+sT
https://youtu.be/CRvVDoQJjYI?list=PLUMWjy5jgHK3-ca6GP6PL0AgcNGHqn33f&t=465
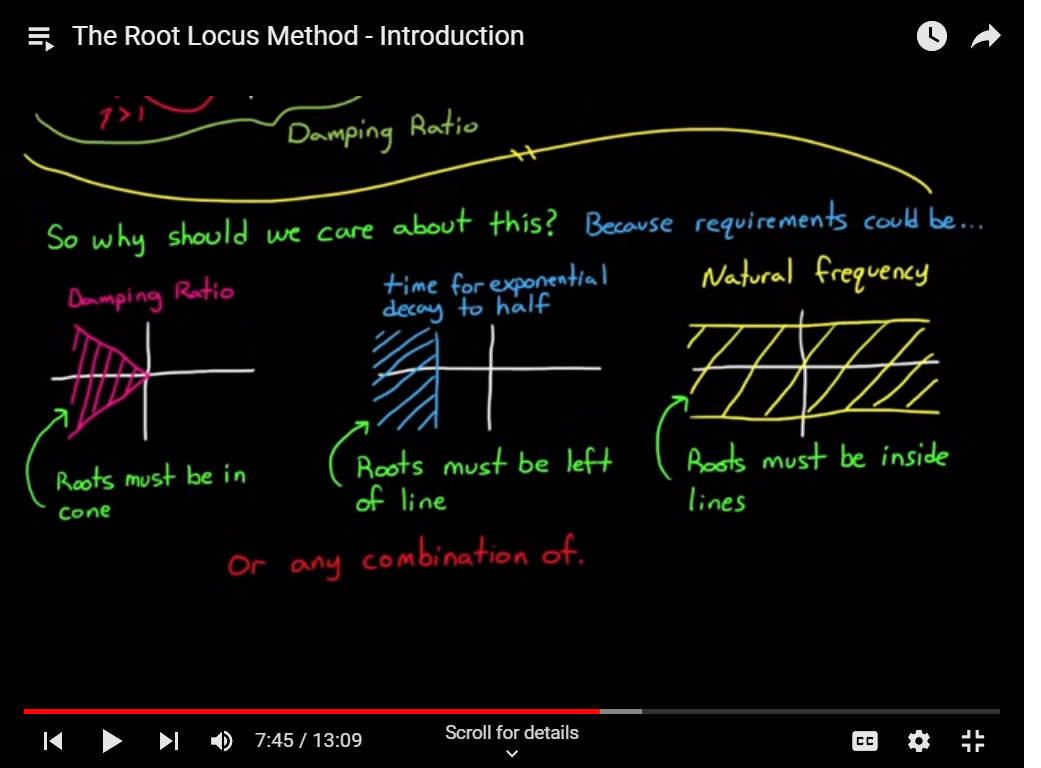
A rendszer sajat valasza, stabilitas az atv fv nevezoje, polusai, energiatarolokhoz kotodnek, nem fugg a gerjesztestol. Ahany energiatarolo, annyi fokszam. Egy tarolo nem leng, csak 2 vagy tobb. Tehat egy polus csak valos lesz, ketto lehet komplex.
A gerjesztesektol fuggo valasz a zerusokhoz, a szamlalo gyokeihez tartoznak.
Az S plane a karakterisztikus egyenletek (szamlalo, zerusok es a nevezo, polusok) gyokeinek abrazolasara komplex sikon, e^delta+-jw. Az S plane fuggoleges tengejen az jw van, tehat minnel tavolabb, annal nagyobb a lengesi freki; a vizszintes tengelye a delta a decay, lecsenges, minnel balrabb a nullatol, annal hamarabb lecseng, nullanal kvasistacionariusban leng, minnel jobrabb annal gyorsabban elszallo erosodo gerjedes.
Ha az S plane jobb oldalon van komplex zerus, akkor egysegugrasra lengo valasz, ugy, hogy ellenkezo elojelu is lesz a valasz, mig elindul a beallas fele.
A jobb oldali zero, nem minimum fazisu rendszert jelent, mert egyebkent a minimum fazisu rendszernel egy adott amplitudo gorbehez adott fazis ertek tartozik, de a nem minimum fazisunal a jobb oldali zerus, vagy a time delay hatarozza meg a hozza tartozo fazist, ami kisebb mint a min fazis es akarmennyi is lehet, “Brian D What Are Non-Minimum Phase Systems? | Control Systems in Practice “:https://www.youtube.com/watch?v=jGEkmDRsq_M&list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b&index=6
Ha komplex jobb oldali zerus van, akkor a beavatkozo jel hatasara, elobb lengeni fog a kimenet, majd indul a beallas fele.
Zerus hatasara rendszer gyosithato
Zerust nem lehet polus nelkul bevezetni
A zerusokhoz pozitiv, a polusokhoz negativ monoton novekvo/emelkedo fazisszog tartozik, Keviczky, 83.oldal, zerusok hatasa
Ruth Hurwitz stabilitas tesztelni jo, de labilis rendszerhez jo a Nyquist stabilitas vizsgalatKeviczky 177.oldal
Jobb oldali labilis polust kiejteni nem szabad, nem megfigyelheto, meg iranyithato lesz; altalanositott nyquist stabilitas kell, ora jarasaval ellentetes 1szer (1 jobb polus eseten) -1et kerulni a szabalyozo+szakasz openloopnak
Evans, Walter R. Evans, https://en.wikipedia.org/wiki/Root_locus_analysis
A zart hurok stablitas vizsgalata egy parameterre nezve
Matlabban hogyan? Teszt (GEG)
Scilabban hogyan? Teszt (GEG)
Kivalasztani a parametert,
Peldaul damping ratio
Vagy hurok erosites
Rendezni az egyenltet: https://youtu.be/eTVddYCeiKI?t=299
Matlab a visszacsatolo agba teszi a parametert https://youtu.be/eTVddYCeiKI?t=237
De nem lenyeges, mert a nevezu ua
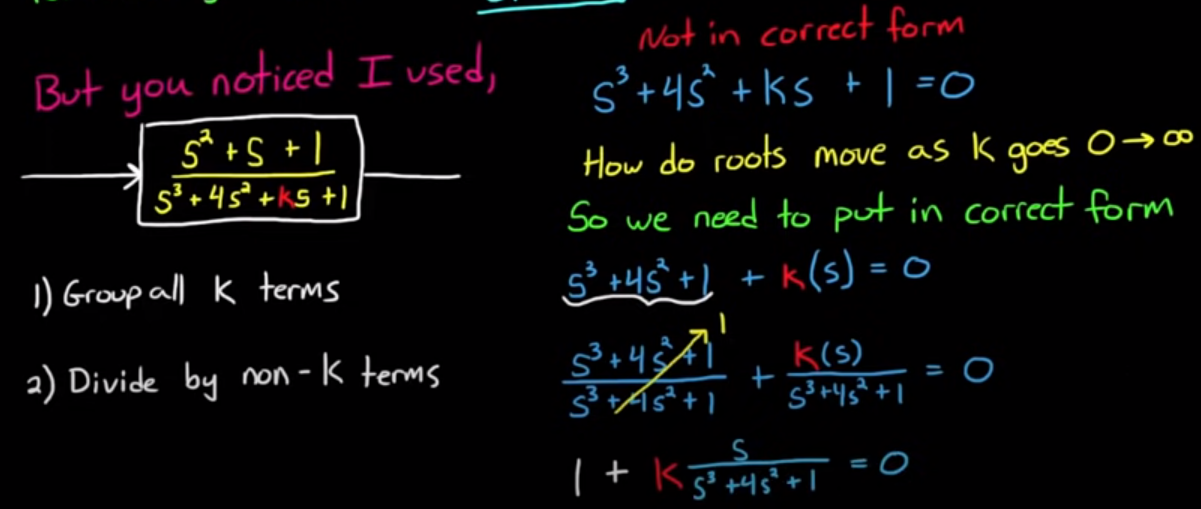
Venni a zart hurok karakterisztkus egyenletet, tehat a nevezot – > 1+K*G(s)=0, ahol G(s)=z(s)/p(s), open loop zerusai, polusai-t abrazolni K tart 0->oo vegtelenbe
Sketch
1,
2,
3
4
5
6
7
8
9
10
Nem minimum fazisu rendszerek
https://www.youtube.com/watch?v=jGEkmDRsq_M&list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b&index=7
Time delay - distorting (phase shift) delay / non-distorting(transport,ideal,unit,latency) delay
https://www.youtube.com/watch?v=wouhREkqZa0&t=0s
Filter
Notch, savzaro https://www.youtube.com/watch?v=tpAA5eUb6eo&t=0s
Feedforward
https://www.youtube.com/watch?v=FW_ay7K4jPE&list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b&index=3
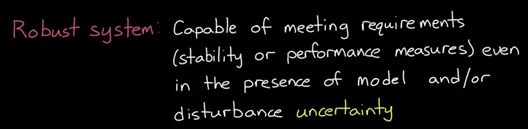
Robosztussag
https://www.youtube.com/watch?v=b_8v8scghh8&list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b&index=8
https://en.wikipedia.org/wiki/Linear%E2%80%93quadratic_regulator
https://en.wikipedia.org/wiki/Optimal_control
https://en.wikipedia.org/wiki/Model_predictive_control
The main advantage of MPC is the fact that it allows the current timeslot to be optimized, while keeping future timeslots in account. This is achieved by optimizing a finite time-horizon, but only implementing the current timeslot and then optimizing again, repeatedly, thus differing from a linear–quadratic regulator (LQR). Also MPC has the ability to anticipate future events and can take control actions accordingly. PID controllers do not have this predictive ability. MPC is nearly universally implemented as a digital control, although there is research into achieving faster response times with specially designed analog circuitry.[3]
Generalized predictive control (GPC) and dynamic matrix control (DMC) are classical examples of MPC.[4]
Model predictive control and linear-quadratic regulators are both expressions of optimal control, with different schemes of setting up optimisation costs.
While a model predictive controller often looks at fixed length, often graduatingly weighted sets of error functions, the linear-quadratic regulator looks at all linear system inputs and provides the transfer function that will reduce the total error across the frequency spectrum, trading off state error against input frequency.
Due to these fundamental differences, LQR has better global stability properties, but MPC often has more locally optimal[?] and complex performance.
The main differences between MPC and LQR are that LQR optimizes across the entire time window (horizon) whereas MPC optimizes in a receding time window,[4] and that with MPC a new solution is computed often whereas LQR uses the same single (optimal) solution for the whole time horizon. Therefore, MPC typically solves the optimization problem in a smaller time window than the whole horizon and hence may obtain a suboptimal solution. However, because MPC makes no assumptions about linearity, it can handle hard constraints as well as migration of a nonlinear system away from its linearized operating point, both of which are major drawbacks to LQR.
This means that LQR can become weak when operating away from stable fixed points. MPC can chart a path between these fixed points, but convergence of a solution is not guaranteed, especially if thought as to the convexity and complexity of the problem space has been neglected.
Brian Douglas, Matlab, Understanding PID control
What Is PID Control? | Understanding PID Control, Part 1
Anti-windup for PID control | Understanding PID Control, Part 2
Noise Filtering in PID Control | Understanding PID Control, Part 3
A PID Tuning Guide | Understanding PID Control, Part 4
3 Ways to Build a Model for Control System Design | Understanding PID Control, Part 5
Manual and Automatic PID Tuning Methods | Understanding PID Control, Part 6
Important PID Concepts | Understanding PID Control, Part 7
Brian Douglas matlab practical controls
What Control Systems Engineers Do | Control Systems in Practice
What Is Gain Scheduling? | Control Systems in Practice
What Is Feedforward Control? | Control Systems in Practice
Why Time Delay Matters | Control Systems in Practice
A Better Way to Think About a Notch Filter | Control Systems in Practice
What Are Non-Minimum Phase Systems? | Control Systems in Practice
4 Ways to Implement a Transfer Function in Code | Control Systems in Practice
The Gang of Six in Control Theory | Control Systems in Practice
The Step Response | Control Systems in Practice
Nichols Chart, Nyquist Plot, and Bode Plot | Control Systems in Practice
Passivity-Based Control to Guarantee Stability | Control Systems in Practice
Why Padé Approximations Are Great! | Control Systems in Practice
What are Transfer Functions? | Control Systems in Practice
Everything You Need to Know About Control Theory
Brian D, matlab, introduction to state space eq
Introduction to State-Space Equations | State Space, Part 1
What is Pole Placement (Full State Feedback) | State Space, Part 2
A Conceptual Approach to Controllability and Observability | State Space, Part 3
What Is Linear Quadratic Regulator (LQR) Optimal Control? | State Space, Part 4
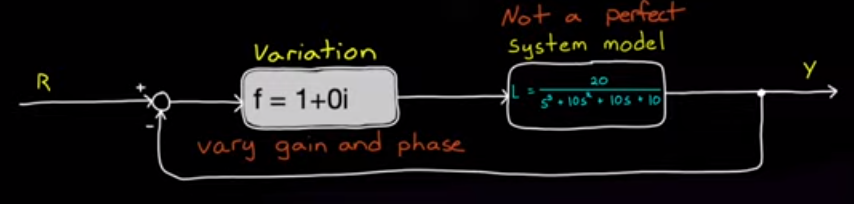
Brian D, matlab, robust control
What Is Robust Control? | Robust Control, Part 1
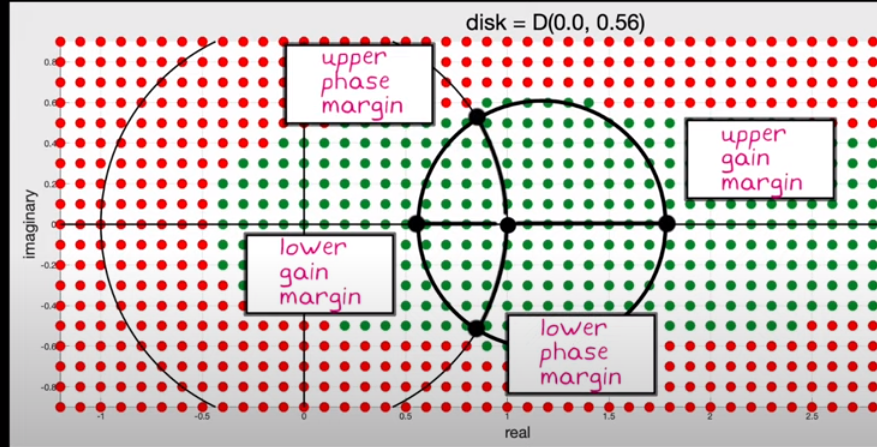
Understanding Disk Margin | Robust Control, Part 2
Disk Margins for MIMO Systems | Robust Control, Part 3
Working with Parameter Uncertainty | Robust Control, Part 4
H Infinity and Mu Synthesis | Robust Control, Part 5
H infinity Controller Design In Matlab Simulink
Control Bootcamp: Sensitivity and Complementary Sensitivity (Part 2)
Control Bootcamp: Loop shaping
Control Bootcamp: Sensitivity and Robustness
Control Bootcamp: Limitations on Robustness
Robust - handling uncertinity
Gain and phase margin meghatarozasa
Brian D, matlab, system identification
What Is System Identification? | System Identification, Part 1
Linear System Identification | System Identification, Part 2
Nonlinear System Identification | System Identification, Part 3
Online and Recursive System Identification | System Identification, Part 4
Brian D , Matlab, learning base control
What is Extremum Seeking Control? | Learning-Based Control, Part 1
Constraint Enforcement for Improved Safety | Learning-Based Control, Part 2
What Is Model Reference Adaptive Control (MRAC)? | Learning-Based Control, Part 3
Brian D , Matlab, reinforcement learning
What Is Reinforcement Learning?
Reinforcement Learning for Engineers, Part 2: Understanding the Environment and Rewards
Reinforcement Learning Policies and Learning Algorithms
Solving the Walking Robot Problem with Reinforcement Learning
Overcoming the Practical Challenges when using Reinforcement Learning
Introduction to Multi-Agent Reinforcement Learning
Why Choose Model-Based Reinforcement Learning?
linearization
Trimming and Linearization, Part 1: What Is Linearization?
Trimming and Linearization, Part 2: The Practical Side of Linearization
Brian D, matlab tech talks , other
Brian Douglas video:
Control System Lectures - Bode Plots, Introduction
Bode Plots by Hand: Real Constants
Bode Plots by Hand: Poles and Zeros at the Origin
Bode Plots by Hand: Real Poles or Zeros
Bode Plots by Hand: Complex Poles or Zeros
CORRECTION: Bode Plots by Hand: Complex Poles or Zeros
Designing a Lead Compensator with Bode Plot
Designing a Lag Compensator with Bode Plot
Discrete control #1: Introduction and overview
Discrete control #2: Discretize! Going from continuous to discrete domain
Discrete control #3: Designing for the zero-order hold
Discrete control #4: Discretize with the matched method
Discrete control #5: The bilinear transform
Discrete control #6: z-plane warping and the bilinear transform
The Root Locus Method - Introduction
Designing a Lead Compensator with Root Locus
Designing a Lag Compensator with Root Locus
Root Locus Plot: Common Questions and Answers
Gain a better understanding of Root Locus Plots using Matlab
Routh-Hurwitz Criterion, An Introduction
Routh-Hurwitz Criterion, Special Cases
Routh-Hurwitz Criterion, Beyond Stability
other
Drone Control and the Complementary Filter
A real control system - how to start designing
Standard HW Problem #2: Which is the real open loop transfer function?
Simplifying and modifying block diagrams
Transfer Functions: Putting it all together
The Laplace Transform - A Graphical Approach
Why Use Kalman Filters? | Understanding Kalman Filters, Part 1
State Observers | Understanding Kalman Filters, Part 2
Optimal State Estimator | Understanding Kalman Filters, Part 3
Optimal State Estimator Algorithm | Understanding Kalman Filters, Part 4
Nonlinear State Estimators | Understanding Kalman Filters, Part 5
How to Use a Kalman Filter in Simulink | Understanding Kalman Filters, Part 6
How to Use an Extended Kalman Filter in Simulink | Understanding Kalman Filters, Part 7
Neso Academy
/***********/
oldal1-RLC
/***********/
openeering,
scilabninja,
Keviczky
https://www.mikrocontroller.net/attachment/341426/Understanding_digital_signal_processing.pdf
https://www.youtube.com/watch?v=wkfEZmsQqiA&list=PLBFsvLJJNYJ2K0Kt2ULF5-0eLXavhQB5i
https://www.youtube.com/watch?v=ApMz1-MK9IQ&list=PLn8PRpmsu08pFBqgd_6Bi7msgkWFKL33b
https://www.youtube.com/watch?v=Z1QS6FsxrJI&list=PLn8PRpmsu08p5KkY8_P8G6fJhelUHHi6b
https://www.youtube.com/watch?v=A7wHSr6GRnc&list=PLn8PRpmsu08qFLMfgTEzR8DxOPE7fBiin
https://github.com/aerojunkie/control-tools
ertekezes szeruen hasznosabb lenne, mert erthetobb a gondolkodas menete, pl: A zerusok a gerjesztesekhez tartozank, a polusok a sajatvalaszhoz. A polusoktol fugg, hogy milyen valaszt ad a rendszer, ha gerjesztest kap es utana mi lesz…insabil, ha jobb oldali a S plane- ami a nevezo karakterisztikus egyenletenek megoldasai---ahol a polus = nulla, aza szakadasa van az atvfv-nek, tehat nem ertelmezett. (?)
resFilter, bandpass
altalaban veve a high, lowpass difftag +20dB/D es +90deg; inttag -20db/D es -90deg; w0-on a ketto kozotti atmenet
quadratic kimenet: a diff reszben +270deg ??? ez mit is jelent??
DerFilt
phase lag/lead , notch
/***********/
oldal2-motorRL, 95.oldal megtanulni, csinalni ra PIDet, 8.5fejezet, 251.oldal, labilis szabalyozasok
/***********/
https://ctms.engin.umich.edu/CTMS/index.php?aux=Home
/***********/
oldal3-mech
/***********/
https://ctms.engin.umich.edu/CTMS/index.php?aux=Home
/***********/
oldal4-bow
/***********/
4,1, modell lagrange/newton
4,2 ABCD
4,3 polezero map
4,4 K à poleplace / LQ à lasd lent!!!
4,5 polezero map
4,6 discretizacio
4,7 polezero map
4,8 robosztussag hatarai: diszkretizacio, LQsulyok, polezeroHol, pospontossag, cooggingTorwue, csuszas, tapfeszNagysag, taőfesz felbontas, tapugrasgyorsasag, homerseklez(R, L, pos, delta_voltage)
/***********/
oldal5-invertedinga
/***********/
POLUSKIEJTES
szimmetrikal optimum, technikal optimum
POLUS ATHELYEZES
Keviczky 277oldal eleg kurta
https://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace#6
106., 127. oldal szerint bow vizsgalat
hol vannak a polusok? https://help.scilab.org/trfmod
hova helyezzuk at? (lasd matlab fent: minnel tavolabb, a gain is csokken)https://help.scilab.org/ppol
hogyan ejtesz ki jobb oldali zero-t -->nem min fazis rendszer, step-re eloszor ellentetes iranyba megy? (ha megfigyelheto es vloszinu, hogy nem konjugalt komplex, hanem csak valos resze van, de ez nem kotelezo)
àbal oldali zerusokkal, de az bal oldali polust is behoz
àallapotvcsvel, de a K onmagaban nem szedi ki, hanem az ’u’ elotti offszet eltolassal valoszinu, hogy ki lehet
--> kiejteni nem jo otlet jobb oldali polusokkal, instabil; a legegyszerubb legjobb, h a system gain csokkentes, lassitani a reakciot, lassabb lesz a beallas, de van ideje reagalni a rendszernek, nem gerjed be
https://www.youtube.com/watch?v=jGEkmDRsq_M&t=3s
Additionally, zeros cannot be be moved by feedback, the way poles can be assigned. Zeros with nonnegative real part cannot be canceled, because the cancellation would be unstable. Thus the designed has to live with them, as a fundamental limitation on our ability to design a feedback controller. (I should add that time-domain linear quadratic control is of limited use in understanding the role of zeros.)
++
megcsinalni, hogy az Splane polus athelyezes hogyan hat a beavatkozo jel kondiciokra: max u es max_du/dt ßez vhol benne van a brain douglas videokban!!
https://web.mit.edu/2.14/www/Handouts/PoleZero.pdf
--------------------
zerusok hatasai:
nyq 0bol +jbe tarto
bode amp +20db
bode ph vagasnal +90be
bal oldali zerussal a rendszer gyorsithato
zerust csak polussal egyutt lehet realizalni
85oldal fazis kesleteto sieteto tag
--
idotarolos alakbol bal/jobb stabil/labilis megallapithato
y=be/ki=(1+sT1)/(1+sT2), ha +, akkor stabil, tehat bal oldali akar zerus(szamlalo) akar polus(nevezo)
--
bodeph: bode-amplitudo-hoz egyertelmuen kotheto, mert
baloldali polus stabilis neg szog tartozik
baloldali zerus stabilis poz szog à min fazisu
jobboldali polus labilis poz bodeph
jobboldali zerus labilis neg bodeph à ezert ez a NEM minimum fazisu
**********
polus athelyezes hogyanok:
https://ctms.engin.umich.edu/CTMS/index.php?example=InvertedPendulum§ion=ControlStateSpace#6
LQ 16.oldal
http://www.openeering.com/sites/default/files/Inverted_Pendulum.pdf
matlab, place()
https://ctms.engin.umich.edu/CTMS/index.php?example=Introduction§ion=ControlStateSpace
https://de.mathworks.com/help/control/ref/place.html
https://www.mathworks.com/help/simulink/slref/discretetimeintegrator.html
Output Equations
With the first time step, block state n = 0, with either initial output y(0) = IC or initial state x(0) = IC, depending on the Initial condition setting parameter value.
For a given step n > 0 with simulation time t(n), Simulink® updates output y(n) as follows:
Forward Euler method:
y(n) = y(n-1) + K*[t(n) - t(n-1)]*u(n-1)
Backward Euler method:
y(n) = y(n-1) + K*[t(n) - t(n-1)]*u(n)
Trapezoidal method:
y(n) = y(n-1) + K*[t(n)-t(n-1)]*[u(n)+u(n-1)]/2
Simulink automatically selects a state-space realization of these output equations depending on the block sample time, which can be explicit or triggered. When using explicit sample time, t(n)-t(n-1) reduces to the sample time T for all n > 0.
Integration and Accumulation Methods
This block can integrate or accumulate a signal using a forward Euler, backward Euler, or trapezoidal method. Assume that u is the input, y is the output, and x is the state. For a given step n, Simulink updates y(n) and x(n+1). In integration mode, T is the block sample time (delta T in the case of triggered sample time). In accumulation mode, T = 1. The block sample time determines when the output is computed but not the output value. K is the gain value. Values clip according to upper or lower limits.
Forward Euler Method
Forward Euler method (default), also known as forward rectangular, or left-hand approximation
The software approximates 1/s as T/(z-1). The expressions for the output of the block at step n are:
x(n+1) = x(n) + K*T*u(n)
y(n) = x(n)
The block uses these steps to compute the output:
Step 0: y(0) = IC (clip if necessary)
x(1) = y(0) + K*T*u(0)
Step 1: y(1) = x(1)
x(2) = x(1) + K*T*u(1)
Step n: y(n) = x(n)
x(n+1) = x(n) + K*T*u(n) (clip if necessary)
Using this method, input port 1 does not have direct feedthrough.
Backward Euler Method
Backward Euler method, also known as backward rectangular or right-hand approximation
The software approximates 1/s as T*z/(z-1). The resulting expression for the output of the block at step n is
y(n) = y(n-1) + K*T*u(n).
Let x(n) = y((n)-1). The block uses these steps to compute the output.
If the parameter Initial condition setting is set to Output or Auto for triggered and function-call subsystems:
Step 0: y(0) = IC (clipped if necessary)
x(1) = y(0)
If the parameter Initial condition setting is set to Auto for non-triggered subsystems:
Step 0: x(0) = IC (clipped if necessary)
x(1) = y(0) = x(0) + K*T*u(0)
Step 1: y(1) = x(1) + K*T*u(1)
x(2) = y(1)
Step n: y(n) = x(n) + K*T*u(n)
x(n+1) = y(n)
Using this method, input port 1 has direct feedthrough.
Trapezoidal Method
For this method, the software approximates 1/s as T/2*(z+1)/(z-1).
When T is fixed (equal to the sampling period), the expressions to compute the output are:
x(n) = y(n-1) + K*T/2*u(n-1)
y(n) = x(n) + K*T/2*u(n)
If the parameter Initial condition setting is set to Output or Auto for triggered and function-call subsystems:
Step 0: y(0) = IC (clipped if necessary)
x(1) = y(0) + K*T/2*u(0)
If the parameter Initial condition setting is set to Auto for non-triggered subsystems:
Step 0: x(0) = IC (clipped if necessary)
y(0) = x(0) + K*T/2*u(0)
x(1) = y(0) + K*T/2*u(0)
Step 1: y(1) = x(1) + K*T/2*u(1)
x(2) = y(1) + K*T/2*u(1)
Step n: y(n) = x(n) + K*T/2*u(n)
x(n+1) = y(n) + K*T/2*u(n)
Here, x(n+1) is the best estimate of the next output. It is not the same as the state, in that x(n) is not equal to y(n).
Using this method, input port 1 has direct feedthrough.
When T is a Variable
WhenT is a variable (for example, obtained from the triggering times), the block uses these steps to compute the output.
If the parameter Initial condition setting is set to Output or Auto for triggered and function-call subsystems:
Step 0: y(0) = IC (clipped if necessary)
x(1) = y(0)
If the parameter Initial condition setting is set to Auto for non-triggered subsystems:
Step 0: x(0) = IC (clipped if necessary)
x(1) = y(0) = x(0) + K*T/2*u(0)
Step 1: y(1) = x(1) + K*T/2*(u(1) + u(0))
x(2) = y(1)
Step n: y(n) = x(n) + K*T/2*(u(n) + u(n-1))
x(n+1) = y(n)
https://www.youtube.com/watch?v=PqDwddEHswU&list=PLn8PRpmsu08ol7qVBak-RUKrBNkn3H58R
https://www.youtube.com/watch?v=__0nZuG4sTw&list=PLn8PRpmsu08pSpYcLLkfXcYlcs5judk0d
What Is Fuzzy Logic? | Fuzzy Logic, Part 1
Fuzzy Inference System Walkthrough | Fuzzy Logic, Part 2
Fuzzy Logic Examples | Fuzzy Logic Part 3
Fuzzy Logic Controller Tuning | Fuzzy Logic, Part 4
1, Linux rt kernel install
5.15.32-v8+
5.15.36-rt41-v8+
git install
2, git clone
imre@raspberrypi:~ $ git clone https://github.com/ballonwheel/ballonwheel.git
Cloning into 'ballonwheel'...
remote: Enumerating objects: 243, done.
remote: Counting objects: 100% (89/89), done.
remote: Compressing objects: 100% (55/55), done.
remote: Total 243 (delta 61), reused 61 (delta 33), pack-reused 154
Receiving objects: 100% (243/243), 245.77 KiB | 3.84 MiB/s, done.
Resolving deltas: 100% (146/146), done.
>sudo apt-get install octave
>sudo apt-get install octave-control
>sudo apt-get install octave-signalcd
3, arduino cli install
https://github.com/arduino/arduino-cli/releases
mkdir /home/imre/bow
cd bow
Kicsomagol ide
imre@raspberrypi:~/bow $ tar -xf arduino-cli_0.29.0_Linux_ARM64.tar.gz
./arduino-cli core install arduino:avr // → avr telepites
4, ../../bow/arduino-cli compile --verbose --fqbn arduino:avr:nano arduino.ino
Lehet ez internet nelkul? Mert ugy tunik, hogy csak online megy, mert auto update van…
5, #sudo chmod 777 /dev/ttyUSB0
6, ../../bow/arduino-cli upload -v -p /dev/ttyUSB1 --fqbn arduino:avr:nano arduino.ino
>df -haT
Filesystem Type Size Used Avail Use% Mounted on
/dev/root ext4 7.1G 2.9G 4.0G 42% /
7, ez akkor kell, ha git push van
imre@thinkpad:~/.ssh$ sudo scp -v id_ed25519.rsa imre@192.168.1.11:~/
8,
imre@thinkpad:~/.ssh$ sudo scp -v id_ed25519.rsa.pub imre@192.168.1.11:~/
9,
imre@raspberrypi:~ $ mkdir .ssh
imre@raspberrypi:~ $ mv id_ed25519.rsa .ssh/
imre@raspberrypi:~ $ mv id_ed25519.rsa.pub .ssh/
imre@raspberrypi:~ $ chmod 755 .ssh/
imre@raspberrypi:~ $ cd .ssh/
imre@raspberrypi:~/.ssh $ chmod 600 id_ed25519.rsa
10,
imre@raspberrypi:~ $ eval "$(ssh-agent -s)"
Agent pid 12933
imre@raspberrypi:~ $ ssh-add .ssh/id_ed25519.rsa
Enter passphrase for .ssh/id_ed25519.rsa:
Identity added: .ssh/id_ed25519.rsa (dobany.hu@gmail.com)
11,
imre@raspberrypi:~ $ cd ballonwheel/
imre@raspberrypi:~/ballonwheel $ git status
On branch main
Your branch is up to date with 'origin/main'.
nothing to commit, working tree clean
imre@raspberrypi:~/ballonwheel $ git config --global user.name "imre from raspZero_1"
imre@raspberrypi:~/ballonwheel $ git commit -a
[main 7db3bc0] teeszt
1 file changed, 1 insertion(+), 1 deletion(-)
12,
https://docs.github.com/en/get-started/getting-started-with-git/managing-remote-repositories
imre@raspberrypi:~/ballonwheel $ git remote set-url origin git@github.com:ballonwheel/ballonwheel.git
imre@raspberrypi:~/ballonwheel $ git remote -v
origin git@github.com:ballonwheel/ballonwheel.git (fetch)
origin git@github.com:ballonwheel/ballonwheel.git (push)
imre@raspberrypi:~/ballonwheel $ git push
The authenticity of host 'github.com (140.82.121.4)' can't be established.
ECDSA key fingerprint is SHA256:p2QAMXNIC1TJYWeIOttrVc98/R1BUFWu3/LiyKgUfQM.
Are you sure you want to continue connecting (yes/no/[fingerprint])? yes
Warning: Permanently added 'github.com,140.82.121.4' (ECDSA) to the list of known hosts.
Enumerating objects: 5, done.
Counting objects: 100% (5/5), done.
Delta compression using up to 4 threads
Compressing objects: 100% (3/3), done.
Writing objects: 100% (3/3), 296 bytes | 42.00 KiB/s, done.
Total 3 (delta 2), reused 0 (delta 0), pack-reused 0
remote: Resolving deltas: 100% (2/2), completed with 2 local objects.
To github.com:ballonwheel/ballonwheel.git
acbe9ab..7db3bc0 main -> main
imre@raspberrypi:~/ballonwheel $
13,
imre@raspberrypi:~/ballonwheel $ sudo apt-get install setserial
14,
imre@raspberrypi:~/ballonwheel $ sudo setserial -v /dev/ttyUSB0 low_latency
/dev/ttyUSB0, UART: unknown, Port: 0x0000, IRQ: 0, Flags: low_latency
15,
imre@raspberrypi:~/ballonwheel $ gcc -v -pthread main.c
16.
>sudo octave
>pkg install -verbose -forge -global control
>pkg install -verbose -forge -global signal
17.
Nano vagy vim
18
Gnuplot
At kellett allni Octave-ra, mert Scilab cli nem fut ARMon.
clear
/*here the bow initialization */
global g;
g=9.81;
//disp(g,"g=");
global Ra;
Ra=0.3;
//disp(Ra, "Ra=")
global La;
La=18e-3;
//disp(La, "La=")
global km;
km=2.518;
//disp(km, "km=")
global ku;
ku=2.093;
//disp(ku, "ku=")
global rw;
rw=0.27;
//disp(rw, "rw=")
mwheel = 6.6; //mass of wheel [kg]
Town = 87.5; ///* ms */ /* time of speedup w/o load*/
mload = 1.08; ///* kg */ /* mass of load (tried to be a equally divided around the circle) */
Tload = 110; ///* ms */ /* time of speedup w/ load */
global Iw;
Iw = Town * ((mload * rw^2) / (Tload - Town)); /* inertia of wheel */
//disp(Iw,"Iw=")
Tm=(Iw*3*Ra)/(km*ku);
Te=(La)/(3*Ra);
global rv;
rv=2.3e-3;
//disp(rv, "rv=")
global mb;
mb=0.203;
//disp(mb, "mb=")
//radius of ball as a sphere
global rbf;
rbf=30e-3;
//disp(rbf, "rbf=")
//radius of circle of ball ON EDGE
global rb;
edge=30e-3;
rb=sqrt(rbf^2-(edge/2)^2);
//disp(rb, "rb=")
global Ib;
Ib=(2/5) * mb * rbf^2;
//disp(Ib, "Ib=")
//**************************************************************
//PI controller design
//**************************************************************
//the motor a PIT1 system
//s=poly(0,'s');
//Big_gamma = km/(ku*km+Ra*rv);
//A_motor=(1/(Ra+L*s)*km*1/(Iw*s));
//B_motor=ku;
//W_motor=syslin('c', (A_motor)/(1+A_motor*B_motor));
//bode(W_motor);
//clf;nyquist(W_motor);
//s=poly(0,'s')
//G=syslin('c', (1/km)/(Tm*Te*s^2+Tm*s+1))
//show_margins(G)
//bode(G)
//K_PID_DCmotorLoad=0.6351
//Ti_PID_DCmotorLoad=0.01
//**************************************************************
//BoW system - space state equations
//**************************************************************
//the system below calculated with Maxima --> file: Bow.mc
nev=(Ib*Iw+mb*rb^2*Iw+mb*rw^2*Ib);
alfaw=(Ib*rw*mb*g)/nev;
betaw=(Ib+mb*rb^2)*(ku*km+rv*Ra)/(Ra*nev);
gammaw=km*(Ib+mb*rb^2)/(Ra*nev);
alfa2=(Iw*rb^2+Ib*rw^2)/((rw+rb)*nev);
beta2=(Ib*rw*(ku*km+rv*Ra))/(Ra*(rw+rb)*nev);
gamma2=(Ib*rw*km)/(Ra*(rw+rb)*nev);
A=[-betaw, 0, alfaw;
-beta2, 0, alfa2;
0, 1, 0];
B=[gammaw; gamma2; 0];
C = [0, 0, 1;];
D = [0;];
// Check contollability
AB = [B, A*B, A*A*B;];
rank(AB);
spec(AB);
BoW_ss = syslin('c', A,B,C);
disp("BoW_ss")
disp(BoW_ss)
BoW_tf = ss2tf(BoW_ss);
disp("BoW_tf")
disp(BoW_tf)
//disp(BoW_tf_manual); //checking both tf equal
//scf(1); clf(1);
//bode(BoW_tf)
//scf(2); clf(2);
//nyquist(BoW_tf);
//scf(3); clf(3);
//plzr(BoW_tf);
//zpk(BoW_tf);
BoW_ssd=dscr(BoW_ss, 0.02);
F=BoW_ssd(2);
g=BoW_ssd(3);
c=BoW_ssd(4);
d=BoW_ssd(5);
disp("BoW_ssd")
disp(BoW_ssd)
/*
F=ppol(A,B,[-1,-1,-1]);
spec(A-B*F);
BoW_ssF = syslin('c', A-B*F,B,C);
BoW_tfF = ss2tf(BoW_ssF);
scf(11); clf(11);
bode(BoW_tfF);
scf(12); clf(12);
nyquist(BoW_tfF)
scf(13); clf(13);
plzr(BoW_tfF);
zpk(BoW_tfF);
*/
//**************************************************************
// LQ project --> K
//**************************************************************
//the system below calculated with Maxima --> file: Bow.mc
//omegaw suly
q1 = 0.009118906527810399;
//q1 = 1
//omega2 suly
q2 = 0.0914991210900477;
//q2 = 1
//fi2 suly
q3 = 131.3122540004697;
//q3 = 1
//Uk suly
R = 0.25;
//R = 1
Q = diag([q1, q2,q3]);
Big = sysdiag(Q,R); //create big common Q R matrix
// Now we calculate C1 and D12
nstates = 3;
// full rank factirazition : egy matrixot tobb matrix szorzatara bontok: a tenyezok rangja azonos legyen az eredeti matrix rangjaval
[w,wp] = fullrf(Big);
C1=wp(:,1:nstates); // kivalasztjuk az osszes sort es az 1->nstates oszlopokat
D12=wp(:,$:$); //[C1,D12]'*[C1,D12]=Big //$ means last element: mindegyik sor utolso eleme-->oszlop matrix
P = syslin('c',A,B,C1,D12); // The plant (continuous-time)
disp("P")
disp(P)
[K,X] = lqr(P);
disp(K)
disp(X)
spec(A+B*K); // check stability
Pd = syslin('d',F,g,C1,D12); // The plant (continuous-time)
disp("Pd")
disp(Pd)
[Kd,X] = lqr(Pd);
disp(Kd)
disp(X)
spec(F+g*Kd); // check stability
//**************************************************************
// estimator discrete
//**************************************************************
//same LQ metode and q used
FT = F';
cT = c';
FTcT = [cT, FT * cT, FT *FT * cT];
rank(FTcT);
spec(FTcT);
// LQ project for estimator
//Q = diag([131.3122540004697,2.05175396875734,0.009118906527810399]) // comes from maxima
//R = 0.25
Big_est = sysdiag(Q,R); //create big common Q R matrix
// Now we calculate C1 and D12
//nstates = 3;
// full rank factirazition : egy matrixot tobb matrix szorzatara bontok: a tenyezok rangja azonos legyen az eredeti matrix rangjaval
[w_est, wp_est] = fullrf(Big_est);
c1_est = wp_est(:,1:nstates); // kivalasztjuk az osszes sort es az 1->nstates oszlopokat
d12_est = wp_est(:,$:$); //[C1,D12]'*[C1,D12]=Big //$ means last element: mindegyik sor utolso eleme-->oszlop matrix
P_est = syslin('d',FT,cT,c1_est, d12_est); // The plant (continuous-time)
disp("P_est")
disp(P_est)
[K_estd,X_estd] = lqr(P_est);
K_estd=-K_estd;
disp("K_estd")
disp(K_estd)
spec(FT+cT*K_estd); // check stability
//--------- estimator gains ---------------
//-----------------------------------------
disp("--------- estimator in feedback ------------")
Gd = -K_estd';
Fd = F - Gd * c;
Hd = g;
disp("Gd")
disp(Gd)
disp("Fd")
disp(Fd)
disp("Hd")
disp(Hd)
//--------- end of calculations ---------------
//-----------------------------------------
/* sensor look up table ADC/degree */
//https://groups.google.com/g/comp.soft-sys.math.scilab/c/_hUrV8ncBUQ?pli=1
//->xy=[1 1;2 2;3 3];
//>save('ff',xy)
//Volt mm adc
//2,30 1,56 91 86 --> 1.0581
//2,91 4,28 205 159 --> 1.2893
//4,08 6,07 296 220 --> 1.3409
/* ---------- EOF bow ini ----------------------------------- */
# not a function file:
1;
function [Q, M, rk] = fullrf(A)
#//[Q,M,rk]=fullrf(A)
#//Full rank factorization : A=Q.M
#//with range(Q)=range(A) and ker(M)=ker(A),
#//Q full column rank , M full row rank
#// rk = rank(A) = #columns(Q) = #rows(M)
#//F.D.
#//!
[U,s,V]=svd(A);
rk=rank(A);
sq=sqrt(s);
Q=U*sq;M=sq*V';
Q=Q(:,1:rk);M=M(1:rk,:);
endfunction
#https://wiki.octave.org/Control_package
#https://wiki.octave.org/Category:Octave_Forge
#https://gnu-octave.github.io/packages/
clear
pkg load control
pkg load signal
#/*here the bow initialization */
# //global g;
g=9.81;
# //disp(g,"g=");
# //global Ra;
Ra=0.3;
# //disp(Ra, "Ra=")
# //global La;
La=18e-3;
# //disp(La, "La=")
# //global km;
km=2.518;
# //disp(km, "km=")
# global ku;
ku=2.093;
# //disp(ku, "ku=")
# global rw;
rw=0.27;
# //disp(rw, "rw=")
mwheel = 6.6; #//mass of wheel [kg]
Town = 87.5; #///* ms */ /* time of speedup w/o load*/
mload = 1.08; #///* kg */ /* mass of load (tried to be a equally divided around the circle) */
Tload = 110; #///* ms */ /* time of speedup w/ load */
# global Iw;
Iw = Town * ((mload * rw^2) / (Tload - Town)); # /* inertia of wheel */
# //disp(Iw,"Iw=")
Tm=(Iw*3*Ra)/(km*ku);
Te=(La)/(3*Ra);
# global rv;
rv=2.3e-3;
# //disp(rv, "rv=")
# global mb;
mb=0.203;
# //disp(mb, "mb=")
# //radius of ball as a sphere
# global rbf;
rbf=30e-3;
# //disp(rbf, "rbf=")
# //radius of circle of ball ON EDGE
# global rb;
edge=30e-3;
rb=sqrt(rbf^2-(edge/2)^2);
# //disp(rb, "rb=")
# global Ib;
Ib=(2/5) * mb * rbf^2;
# //disp(Ib, "Ib=")
#//**************************************************************
#//PI controller design
#//**************************************************************
#//the motor a PIT1 system
#//s=poly(0,'s');
#//Big_gamma = km/(ku*km+Ra*rv);
#//A_motor=(1/(Ra+L*s)*km*1/(Iw*s));
#//B_motor=ku;
#//W_motor=syslin('c', (A_motor)/(1+A_motor*B_motor));
#//bode(W_motor);
#//clf;nyquist(W_motor);
#//s=poly(0,'s')
#//G=syslin('c', (1/km)/(Tm*Te*s^2+Tm*s+1))
#//show_margins(G)
#//bode(G)
#//K_PID_DCmotorLoad=0.6351
#//Ti_PID_DCmotorLoad=0.01
#//**************************************************************
#//BoW system - space state equations
#//**************************************************************
#//the system below calculated with Maxima --> file: Bow.mc
nev=(Ib*Iw+mb*rb^2*Iw+mb*rw^2*Ib);
alfaw=(Ib*rw*mb*g)/nev;
betaw=(Ib+mb*rb^2)*(ku*km+rv*Ra)/(Ra*nev);
gammaw=km*(Ib+mb*rb^2)/(Ra*nev);
alfa2=(Iw*rb^2+Ib*rw^2)/((rw+rb)*nev);
beta2=(Ib*rw*(ku*km+rv*Ra))/(Ra*(rw+rb)*nev);
gamma2=(Ib*rw*km)/(Ra*(rw+rb)*nev);
disp("------- continous --------");
A=[-betaw, 0, alfaw;
-beta2, 0, alfa2;
0, 1, 0];
B=[gammaw; gamma2; 0];
C = [0, 0, 1;];
D = [0;];
disp("A")
disp(A);
disp("B")
disp(B);
disp("C")
disp(C);
disp("D")
disp(D);
#// Check contollability
AB = [B, A*B, A*A*B;];
disp("AB")
disp(AB);
rAB=rank(AB);
disp("rank AB")
disp(rAB);
eAB=eig(AB);#spec(AB);
disp("eigen AB")
disp(eAB);
BoW_ss = ss(A,B,C,D);
disp("BoW_ss");
disp(BoW_ss);
BoW_tf = ss2tf(BoW_ss);
disp("BoW_tf");
disp(BoW_tf);
#//disp(BoW_tf_manual); //checking both tf equal
#//scf(1); clf(1);
#//bode(BoW_tf)
#//scf(2); clf(2);
#//nyquist(BoW_tf);
#//scf(3); clf(3);
#//plzr(BoW_tf);
#//zpk(BoW_tf);
disp("------- discrete --------");
Ts=0.02;
disp("Ts");
disp(Ts);
BoW_ssd=c2d(BoW_ss, Ts);
F=BoW_ssd.a;
g=BoW_ssd.b;
c=BoW_ssd.c;
d=BoW_ssd.d;
disp("Bow_ssd");
display(BoW_ssd);
disp("F");
disp(F);
disp("g");
disp(g);
disp("c");
disp(c);
disp("d");
disp(d);
#/*
#F=ppol(A,B,[-1,-1,-1]);
#spec(A-B*F);
#BoW_ssF = syslin('c', A-B*F,B,C);
#BoW_tfF = ss2tf(BoW_ssF);
#scf(11); clf(11);
#bode(BoW_tfF);
#scf(12); clf(12);
#nyquist(BoW_tfF)
#scf(13); clf(13);
#plzr(BoW_tfF);
#zpk(BoW_tfF);
#*/
disp("------- LQ reglator --------");
#//**************************************************************
#// LQ project --> K
#//**************************************************************
#//the system below calculated with Maxima --> file: Bow.mc
#//omegaw suly
q1 = 0.009118906527810399;
#//q1 = 1
#//omega2 suly
q2 = 0.0914991210900477;
#//q2 = 1
#//fi2 suly
q3 = 131.3122540004697;
#//q3 = 1
#//Uk suly
R = 0.25;
#//R = 1
Q = diag([q1, q2,q3]);
Big = blkdiag(Q,R); # //create big common Q R matrix
#// Now we calculate C1 and D12
nstates = 3;
#// full rank factirazition : egy matrixot tobb matrix szorzatara bontok: a tenyezok rangja azonos legyen az eredeti matrix rangjaval
# https://www.mathworks.com/matlabcentral/fileexchange/19197-full-rank-factorization
[w,wp] = fullrf(Big);
C1=wp(:,1:nstates); #// kivalasztjuk az osszes sort es az 1->nstates oszlopokat
#D12=wp(:,$:$); #//[C1,D12]'*[C1,D12]=Big //$ means last element: mindegyik sor utolso eleme-->oszlop matrix
D12=wp(:,end); #//[C1,D12]'*[C1,D12]=Big //$ means last element: mindegyik sor utolso eleme-->oszlop matrix
disp("A");
disp(A);
disp("B");
disp(B);
disp("C1");
disp(C1);
disp("D12");
disp(D12);
#P = syslin('c',A,B,C1,D12); # // The plant (continuous-time)
P = ss(A,B,C1,D12); # // The plant (continuous-time)
disp("P");
display(P);
[K,X] = lqr(P, Q, R);
K=-K;
disp("K");
disp(K);
disp("X");
disp(X);
#spec(A+B*K); # // check stability
eABK=eig(A+B*K); # // check stability
disp("eABK");
disp(eABK);
#Pd = syslin('d',F,g,C1,D12); # // The plant (continuous-time)
Pd = ss(F,g,C1,D12, Ts); # // The plant (continuous-time)
disp("Pd");
display(Pd);
[Kd,Xd] = lqr(Pd, Q, R);
Kd=-Kd;
disp("Kd");
disp(Kd);
disp("Xd");
disp(Xd);
eABKd=eig(F+g*Kd); # // check stability
disp("eABKd");
disp(eABKd);
disp("---------- estimator ---------");
#//**************************************************************
#// estimator discrete
#//**************************************************************
#//same LQ metode and q used
FT = F';
disp("FT");
disp(FT);
cT = c';
disp("cT");
disp(cT);
FTcT = [cT, FT * cT, FT *FT * cT];
disp("FTcT");
disp(FTcT);
rFTcT=rank(FTcT);
disp("rFTcT");
disp(rFTcT);
eFTcT=eig(FTcT);
disp("eFTcT");
disp(eFTcT);
#// LQ project for estimator
#//Q = diag([131.3122540004697,2.05175396875734,0.009118906527810399]) // comes from maxima
#//R = 0.25
#Big_est = sysdiag(Q,R); # //create big common Q R matrix
Big_est = blkdiag(Q,R); # //create big common Q R matrix
#// Now we calculate C1 and D12
#//nstates = 3;
#// full rank factirazition : egy matrixot tobb matrix szorzatara bontok: a tenyezok rangja azonos legyen az eredeti matrix rangjaval
[w_est, wp_est] = fullrf(Big_est);
c1_est = wp_est(:,1:nstates); #// kivalasztjuk az osszes sort es az 1->nstates oszlopokat
d12_est = wp_est(:,end); #//[C1,D12]'*[C1,D12]=Big //$ means last element: mindegyik sor utolso eleme-->oszlop matrix
disp("FT");
disp(FT);
disp("cT");
disp(cT);
disp("c1_est");
disp(c1_est);
disp("d12_est");
disp(d12_est);
P_est = ss(FT,cT,c1_est, d12_est, Ts); # // The plant (continuous-time)
display(P_est);
[K_estd,X_estd] = lqr(P_est, Q, R);
disp("K_estd");
disp(K_estd);
disp("X_estd");
disp(X_estd);
eFTcTKestd=eig(FT+cT*K_estd); # // check stability
disp("eFTcTKestd");
disp(eFTcTKestd);
disp("---- estiamtor in feedback ----");
Gd = -K_estd';
Fd = F - Gd * c;
Hd = g;
disp("Gd");
disp(Gd);
disp("Fd");
disp(Fd);
disp("Hd");
disp(Hd);
#/* sensor look up table ADC/degree */
#//https://groups.google.com/g/comp.soft-sys.math.scilab/c/_hUrV8ncBUQ?pli=1
#//->xy=[1 1;2 2;3 3];
#//>save('ff',xy)
#//Volt mm adc
#//2,30 1,56 91 86 --> 1.0581
#//2,91 4,28 205 159 --> 1.2893
#//4,08 6,07 296 220 --> 1.3409
#/* ---------- EOF bow ini ----------------------------------- */
Lényegében két probléma adódott:
1, fullrf() függvényt kellett kreálni (itt meg kene csinalni, hogy kezelje a pici ertekeket is, de nekem most nem jelent problemat)
2, fullrf() altal szamolt K-t invertalni kell: K= - K; Ezt ki kellene deriteni miert…
Gd
-0.0072266
-0.4361841
-1.0046602
Fd
0.3234495 0.0000853 0.0144348
-0.2148639 1.0021797 0.6538169
-0.0025432 0.0200145 2.00684
Hd
0.3232021
0.1026449
0.0012149
Gd
-0.0072266
-0.4361841
-1.0046602
Fd
0.323449491 0.000085319 0.014434845
-0.214863863 1.002179746 0.653816910
-0.002543177 0.020014545 2.006839993
Hd
0.3232021
0.1026449
0.0012149
-o-